@saddi1991 wrote:
How can we forbid pilot from configuring ardupilot from gcs, Such that during flight unnecessary parameters cannot be reconfigured.
Posts: 1
Participants: 1
@saddi1991 wrote:
How can we forbid pilot from configuring ardupilot from gcs, Such that during flight unnecessary parameters cannot be reconfigured.
Posts: 1
Participants: 1
@RizHass wrote:
I cannot find FS_options in the Advance Parameter tree on MP. Ardupilot document list this parameter:
Posts: 1
Participants: 1
@danielh wrote:
Hi,
I want arducopter to use distances measured on a companion computer as a rangefinder.
How do I configure arducopter to accept mavlink distance_sensor messages as a rangefinder?
I see that the messages are received by the autopilot, but they seem to be ignored (sonar range on mission planner remains 0.00).Thanks!
Posts: 1
Participants: 1
@manuk wrote:
Updates my copter from 3.5 to 4.0.3 and now I have some issues with Mission Speed.
WPNAV_SPEED is set to 1000, SPEED_DN and _UP is set to 150.
WPNAV_LOIT_SPEED is 1000, too and RTL_SPEED is set to 0 (will change this parm later this day but I don’t used RTL during my testflight).If I set a mission, straight line 200m in one direction, the copter fly only with 2m/s exactly in AUTO. In LOITER it will fly with 10m/s as expected. I tried the DO_SET_SPEED with different parms, no change.
Setting WPNAV_SPEED to 500 = copter reached 5m/s.
Setting WPNAV_SPEED to 1010 = copter reached around 9m/s (maybe the mision was to short to get the full 10m/s)
Setting WPNAV_SPEED back to 1000 = copter reached 2m/sMy battery runned out so I had to stop testing this morning…
Maybe a full parameter reset is a good idea?
Thank you.
Posts: 1
Participants: 1
@yolo322 wrote:
Hi,
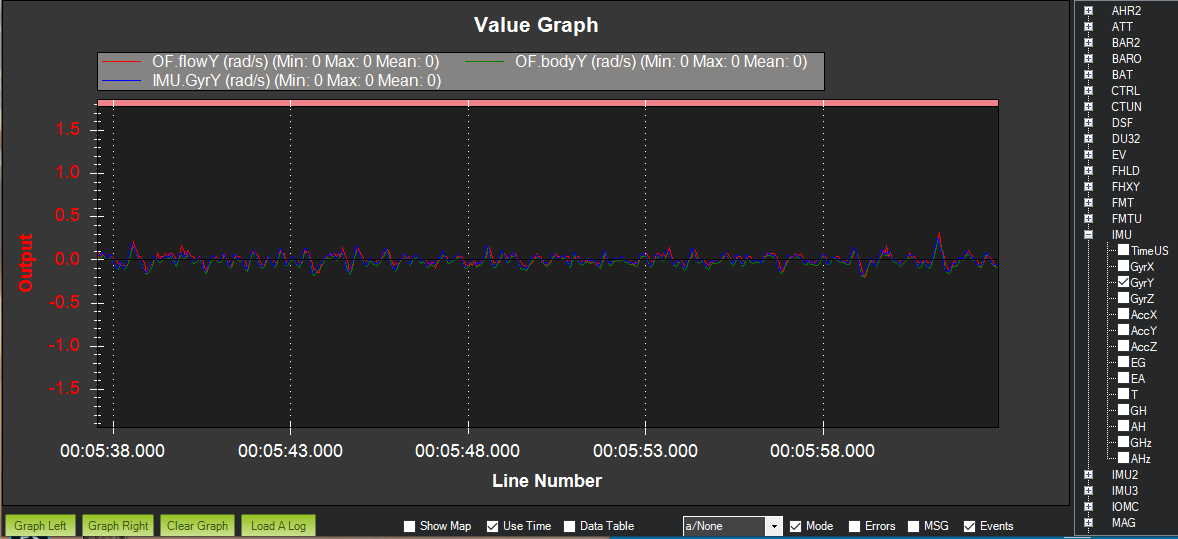
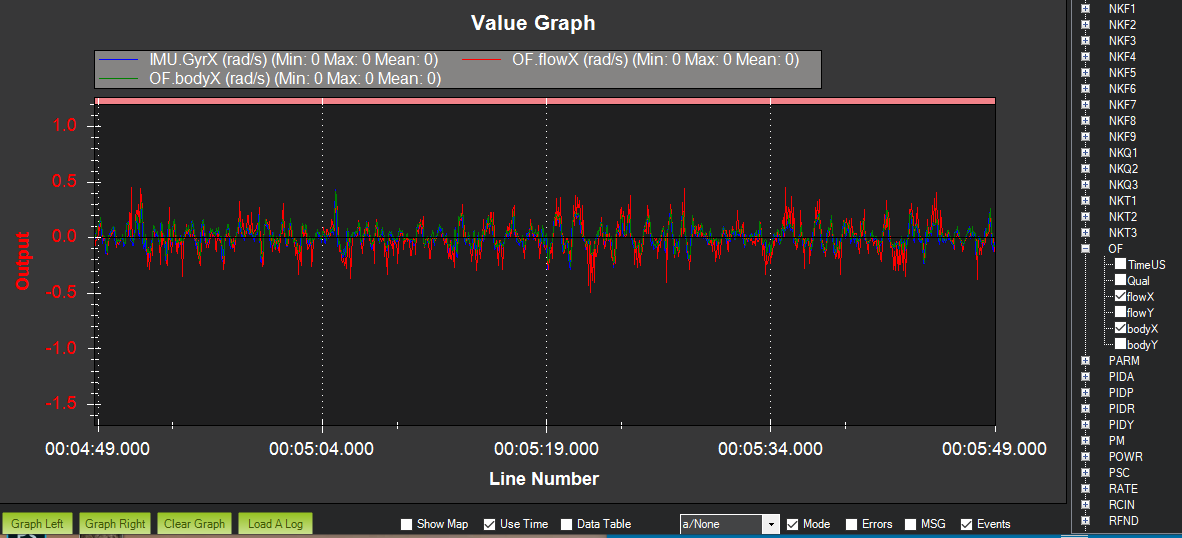
My quad is using copter 3.6 with Hereflow sensor and flying indoor at a height of 1.6m above carpet in PosHold mode.
The flow sensor is tuned according to this guide:
The OF log from flights are here:
The quad is unable to hold its position well, tends to drift backwards and to the right slowly. Need help to figure out what cause the drifting please. Thank you
Posts: 1
Participants: 1
@Moksh wrote:
Hello everyone , i want to need current point like location + altitude + face point , during 1 switch on = save this and when I need reach that point then once again switch on copter position at my location.
Is it avaible ???
Thank you
Posts: 1
Participants: 1
@Jan_Swanepoel wrote:
Hi All,
Does anybody know if it’s possible to show the GeoFence on the Flight Data view of MP when using only a Cylindrical Fence?
If I create a polygon fence or FENCE_CIRCLE_INCLUSION then I can see it but I was just curious how to display the fence if my FENCE_TYPE = Circle.
The reason for this is that I often keep the cylindrical fence tight to my flight area and later change the flight plan and forget to adjust the fence. If I could see the fence in Data or Plan views then I could see that I would hit it and need to adjust the radius.
Posts: 1
Participants: 1
@warp2 wrote:
Hi all
I would like to have for a watching person a telemtry listening device to monitor mavlink telemetry data from the vehicle. There is no possibility to have a WLAN network between the GCS and the watching position and I would not like to use GSM to forwarding in mavproxy.
Is there a way to set up mavproxy to just listening to the mavlink messages and display the position and speed…
Thanks for your help
Mat
Posts: 1
Participants: 1
@myozone wrote:
Having partially changed my mind over starting out with a Pixracer, I’ve been looking at the Pixhawk 4 Mini and wondered if anyone is using it with Yaapu telemetry. What I thought is with only one telemetry port ‘Telemetry 1’ on the Pixhawk mini would this be an issue as Yaapu appears to use tele2 ? - I’m guessing it could be changed in Mission Planner.
Posts: 4
Participants: 2
@ItsMeAubey wrote:
I just noticed that there’s a new firmware (3.16) for 900x modems, but that there is no documentation of any changes. Does anybody know what was changed? RFDesign’s website seems to be down right now so don’t have any way to contact them.
Release notes link: https://github.com/RFDesign/rfdesign.github.io/blob/master/Files/firmware/RFD%20X%20modems%20SiK%20V3.X%20release%20notes.txt
Posts: 1
Participants: 1
@ninja_zx11 wrote:
Hi all,
I would like to graph my RSSI and distance from home from the data flash log.How can i use this formula :
sqrt(XKF1.PE^2 + XKF1.PN^2)to get distance from home?
It would be nice to have this value pre-calculated and ready for selection from the mission planner.Thanks.
Posts: 1
Participants: 1
@Tudole wrote:
Hi,
I am pretty new to ArduPlane and I have some question regarding the PID controller. As the document described, the ki gain is in the down stream of the rate error. That will make the control output of this loop very similar to the kp loop, since integrating rate error will get position error. This loop is not exactly the I loop for attitude control from a classical control theory point of view. I’ve put together a Simulink 1 DOF model, and figured out this “ki” loop barely trim out the residue of the position error, it’s approaching the reference target slowly (asymptotic). It’s also eating up margins to the kd loop. Was it a mistake in the picture?
Posts: 1
Participants: 1
@JDeForest wrote:
I’m creating a bunch of missions which have pre selected lat lon. I’ve been just copying the lat lon, into a .waypoints file. I understand most of what the columns are in the CSV but some I am not sure what the values represent
A- waypoint number
B- ?
C- ?
D- ?
E- param1
F- param
G- param
H- param
I- Lat
J- Lon
K- altitude
L- ?Altitude seems to be represented by another column, I’m guessing B or C as to whether altitude is AGL or MSL. Anyone know what the other columns do, or where to find that info?
Posts: 3
Participants: 2
@pemase wrote:
This is a renewed high-quality power module standard based on the ACSP7 but with dual internal power supply to improve the stability of the hall-sensing.The mRo Power Zero from mRobotics is designed especially for the Ardupilot community and it offers extremely accurate measurements across the entire current & voltage operating range with a non-invasive Hall-effect current sensor for UAV / Robotics application and high precision voltage dividing circuit for consistent and reliable measurements.
Compared to the ACSP7, the .5v offset is removed and the current sensing is compared with a dedicated power reference. The integrated electrolytic capacitor reduces voltage spikes which result from longer input cable lengths and higher voltage batteries.
SPECIFICATIONS:
Power Module mRo Power Zero Dimensions 18mmx18mm (.70"x.70") Height: 7.30 mm (0.28") Weight 2.5g (0.08 oz) Maximum input voltage 50.4v 12s lipo Max Current Sensing 90 Amps Max Current from 5.3V Power Supply 2 Amps Compatibility Ardupilot & PX4 PINOUT:
If you want to make your own cables and route them to connect it to your autopilot, you can simply follow the order of the pinouts as it is the same Dronecode standard.
CONFIGURATION INSTRUCTIONS:If you want to configure it on Mission Planner, you can follow this instructions .
Have fun!, and remember that “Without electricity, there can be no art.”
Posts: 3
Participants: 3
@Ragbagger wrote:
I purchased a Benewake TF03-180 Lidar and was working on connecting it. The Arducopter documentation at https://ardupilot.org/copter/docs/common-benewake-tf02-lidar.html shows serial port 4 connected to the green and white wires. The document from Benewake for the TF03 shows UART on the brown and yellow wires. I wondered which one to go with. I hooked it up to the o-scope and sure enough there is serial data on the yellow and nothing on either green or white. I don’t know if Benewake changed something or not but maybe it should be pointed out in the documentation.
Posts: 3
Participants: 3
@Peter2 wrote:
Hi everyone…
My plane was flying amazing yesterday… But today after 100 alt it was loss altitude in stabilize mode…
Any idea
Posts: 3
Participants: 2
@spetsnaz26 wrote:
i have a tricycle airplane that is too difficult to control on ground. Directional control is divergent outside maybe one or two degree of rudder stick throw and the amount of directional input must change simultaneously with throttle advance. What didn’t help was that I had to take off from a narrow and uneven beat-up country road to avoid people/property. I kept running off into the ditch or pirouetting in 360 deg. I know this is an easy routine for most builders, but I’ve crashed and repaired my plane too many times to continue this practice.
I’ve read about takeoff mode and tried hand launch with some success with my previous airplane but my new one is too heavy and bulky to launch reliably. Is it true that the autopilot can hold heading much better than me in manual mode on ground, if I set up a CTOL auto takeoff? The documentation also mentions takeoff in FBWA, but rudder is under manual control, so I guess it won’t help at all? Help is appreciated.
Posts: 3
Participants: 2
@Andre-K wrote:
I am making a warning system for engine cut, so if anyone can please post a log with RPM, it would help.
It does not need to be a flight, bench-testing ok, RPM changes and start stops are welcome.Thank you.
Posts: 1
Participants: 1
@Siya wrote:
Hello ~
I think many many drones/UAV players have known and played with Benewake TFmini, TFmini Plus and TF02 LiDAR for obstacles avoidance/anti-collision/altimeter/terrain following/distance keeping applications,etc.
Now Benewake have upgraded TFmini and TF02 to new model with better technical parameters, more stable performance and lower cost. Please check below comparasion if you inerested : )
And easy buy link below
Benewake full LiDAR on IR-LOCK ( the US):
Benewake full LiDAR on MyBotShop (EU):
Benewake full LiDAR on Robu.in (India):
https://robu.in/brand/benewake/Any technical questions are welcome to be published here. Thanks.
Posts: 1
Participants: 1