For the first time I could test QGC with a video stream (EZ-WifiBroadcast).
I first tried it with QGC Linux on a Linux PC with wifi connection to the base. The video latency was very ssmall (0.1 or 0.2 sec).
But with QGC Android, on a tablet with wifi connection to the base, the video had around 2 seconds latency !!
I didn’t have any latency with telemetry with both versions …
Is there a problem with video player in QGC Android ?
Hi,
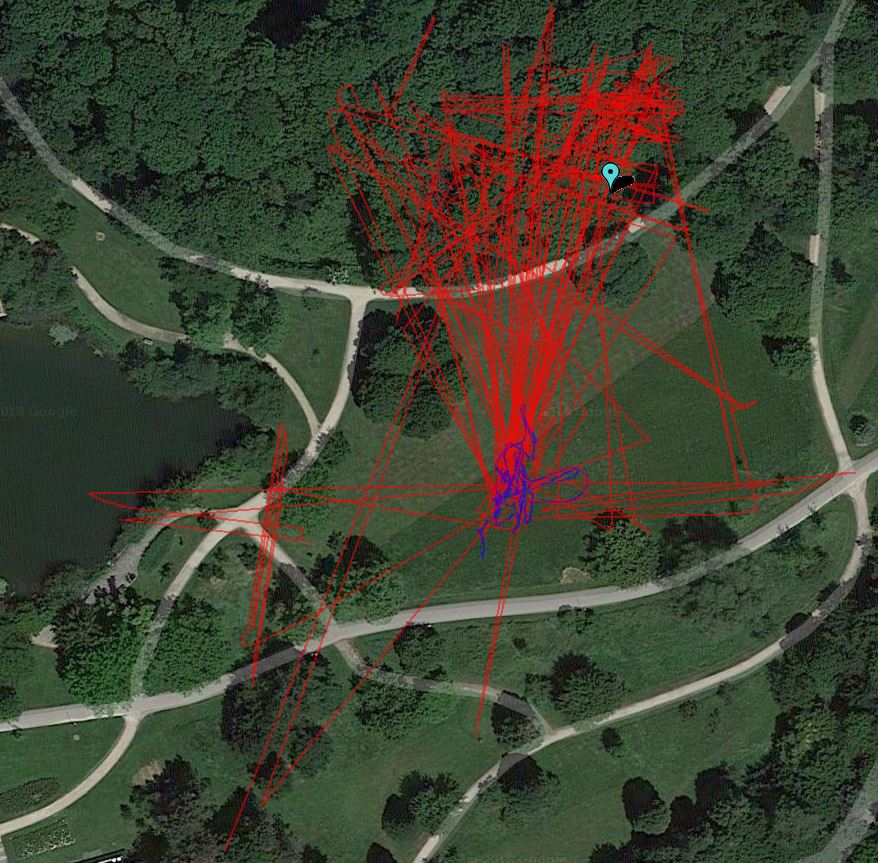
I am still new to the ardupilot system… We have had some very nice flights in acro and stabilize without GPS. Today, I tested GPS for the first time, and the result is “catastrophic”. I attached some screenshots from the log browser.
The GPS (Here+ used without RTK base) had to be mounted on a 1m long tower on top of the copter. I am using a USB 3.0 cable as extension, RxD/TxD, SCL/SDA are on the SDP / UTP cable pairs. I know that this is a really bad idea, but I needed to try anyway. Would you agree that the cable length is the cause of the problem? To me it looks like the data sent from the GPS to the Pixhawk2.1 is corrupt due to the cable length. But would this cause glitches, is there no checksum etc…? Surprisingly, the compass is still working despite the extremely long cable extension…
I will for sure try to get the GPS much closer to the copter, bt I would like to hear your opinion on this issue…
I have multiple MaxBotix I2C sonars, my idea is to use one as obstavcle avoidance on the front and the second one pointing down to measure the high. Each one will work fine alone, but when i plug the sencond to the i2c riel seems like to interfer each other. So I have change the address of one of the sonar, but any address different to the 224 make the sonar stop working on the pix.
Another thing I realize is the PixHacwk 2.1 only get the rngfnd and never the rngfnd2.
Im missing something? Any one did sonmethin similar?
Howdy! I’m installing a Pixhack v5. It came with a nice wifi telem module, but I can’t find any info on the default password. I tried “password” and “admin” to no avail. Any help welcome!
Here’s the module in question, no manual of course
Hello. I’m a little confused and hoping someone can help.
I’m starting a VTOL Tilt Rotor project and an trying to follow QuadPlane and Tilt-Rotor docs, but it doesn’t make sense when I look at the Parameters in QGroundControl. I flashed the latest PX4 Flight Stack and accessed the Pixhawk with QGC. I selected the Firefly 6, and everything seems to be going well, but the parameters do not resemble the parameters dictated in the docs. The docs mention “Q_Enable” and other Q_ references, and I don’t see them.
Am I doing something wrong?
I’m thinking that it is my confusion between Pixhawk and Ardu.
I am totally new to Pixhawk, Ardu, etc. I have worked with Eagle Tree Vetor and iNav, so I know that i am capable. I might just need some hint.
Thanks
We’ve just release Copter-3.6.2-rc2 for beta testing and it should be available within a couple of hours from Mission Planner and QGC using the Beta Firmware selection of each app.
This release has just three changes that are listed in the Release Notes and also copied below:
Bug fixes:
a) Benewake TFmini and TF02 driver checksum fix (was missing many sensor readings)
b) Range finders report healthy to GCS when out-of-range
c) RPM sensor reliability fix by initialising analog input pin
Thanks very much to those users who took the extra time to report issues here on the forums, providing dataflash log and helping us work through these niggling issues!
P.S. if you’re wondering, “what happened to 3.6.2-rc1?” - we decided to include the last fix for the RPM sensor just as the release was going out.
During a reorg and cleanup at work I came into posession of a 3DR X8+. It was purcheased in late 2014 used at little and shelved. The FMU says APM Copter, on the side it is marked 3DR PX4. The camera has been removed. The camera transmitter is there marked TS2501_120511. The order sheet shows LiveView kit for GoPro. The rest of the X8+ seems to be intact(915MHz telemetry, GPS, D4R-II. Two 10000ma 14.8v batteries and e4 SKYRC charger.
Batteries charged fine.
There is a 3DR 915 MHz with micro usb that when connected to my Nexus 7 is seen by DroidPlanner 2.0.
The flight controller is a FS-TH9X. Someone applied labels to the controls. There is a 3DRobotics FPV LCD mounted to the controller. A Fr Sky DJT Telemetry module plugged into the back.
I have been reviewing the operators manual and youtube videos on the X8+.
Before attempting to fly this, are there any other things I should check?
Hey guys! Does anyone have any idea on how to get two flight controllers such as the Navio2 to communicate with each other? I am trying to build two quad-copters that will basically need to fly in unison. To do that I need to get the flight controllers to communicate with each other basically making one the master and the other the slave. Anyone have any idea on how to do that?
Hi,
Since , i installed AC3.6.0 rc11 with ChibiOS on my PX4v2, i can’t connect the USB port in windows , it works in linux.Now , i upgraded to AC3.6.1 and i can’t downgrade , i always have “failed download” trying AC 3.5.7.
Another problem , in the Failsafe , i do not have access to the Voltage battery adjustement , it is grayed.
Thanks for help ,this morning i was flying now i am grounded:hushed:
Frame is about a 700mm quadcopter with 17x5.5 props on 580kv motors and 35A Castle ESC’s. Power is 3S 5500mah x 3.
I have been flying this frame, motor, esc combo for years, and it works great. It uses a Pixhawk 1 and/or a Pixfalcon and flies stable with around 40 minute flight times.
We primarily do aerial mapping using Sony a5100’s and a6000’s. I am trying to swap out FC’s for newer versions for RTK gps and newer and faster hardware/firmware, but I am absolutely stuck.
I first tried a Cube and it rolls and yaws aggressively to the right until it toiletbowls a couple of times and then crashes, and I just tried a Pixhawk4 today and it still does the same thing. I have calibrated and recalibrated, changed beginning PID’s to 10hz, etc. I aggressively throttle up to get off the ground. and I know most of the tricks for trimming a large quad, double checking motor and prop config, etc,
I think it must be some default parameter that I have missed as the same thing has happened on 2 different autopilots running Copter 3.6.0. I’m sure someone will spot my problem right away as I suck at analyzing the logs.
Here are the logs from two flight attempts today. Thanks very much for the help.
I’m trying to configure a Traxxas car with VXL-3s ESC.
I’ve followed the tutorials and essentially connected steer to Main-Output 1 and throttle to Main-Output 3.
PIxhawk is powered by regulator (from pixhawk) whose between ESC and battery.
When I do the test, both motors works well. (Optional HW --> Motor Test)
With my controller (FS-T6) I can control the steering smoothly, and I see in Mandatory HW–> Servo Output the movement of the green bar as I move the joystick.
But in Throttle I do not see the bar moving, and also it is not working. It seems like some @param is not configured to recieve the signal, I searched many places but I didn’t see any info helpfull.
Hi everybody
We have some issue with logs of camera triggers. We try to geotag photos using TRIG records. In some missions we have multiple TRIG records for what is in our opinion single event. Here is example log done on the ground, where we carried copter with distance trigger enabled: https://drive.google.com/open?id=19bJzJxTcd3T7kS0DqWzUL2UP_TiNfj7z
Please look at TRIG records from 16:47:04 to 16:47:05 - there are 10 record couple hundreds ms apart. We have:
CAM_DURATION,7
CAM_MIN_INTERVAL,1400
Camera triggered once.
Now we are having to use 3.6.1 copter firmware I see that in ‘Basic Tuning’ the RC FEEL adjustment slider has been removed. This is a really useful adjustment tool as it reduces sensitivity of the the RC input making the aircraft less sensitive on the sticks without adjusting gains.
Can anyone tell me where this has gone, or why it has been removed? Can’t find it anywhere in any parameter lists.
If it is gone for good, then I would really like to know how to get back to 3.5.4 / 3.5.6 / 3.5.7 which were versions we were very happy with and that included this feature. The Load Custom Firmware options doesn’t offer any of these and versions on GitHub are not labelled in any intelligible way as far as I can see. Is there any reason why there can’t just be a folder with old versions in it. Easy to find with folders clearly and simply labelled for the different version numbers. Any chance this could happen?
When the system is commanded a transition from any mode to STABILIZE then immediately to GUIDED, the Copter descends at maximum rate until the desired altitude hits zero. Then is commanded to climb again at the initial altitude
The STATUSTEXT message (#253) provide warnings (such as prearm: …) in plain text (50 char).
I wanted to grab them by my osd board, but that doesn’t work.
Sending this message should not depend on a stream request - or does it ? If so, which stream should be requested ? If not, what has to be done to make the pixhawk sendi this message ?
I can’t get my Cube to arm because the pre arm safety switch warning comes up. I have the safety switch disabled in the full parameter list. I’m on 3.6.1
Omnibus F4 Pro V2 running ArduPlane V3.10.0-dev (9cd62e81) works OK with MP 1.3.58, but gives EKF errors with MP 1.3.59. Proved the fault by downgrading to MP 1.3.58. I will look for the appropriate forum to log the issue.
I want to go back to Copter 3.5.7 after having a couple of issues with the latest firmware (3.6.1) However, when i choose 3.5.7 from the previous firmware options Mission Planner is unable to download it. It throws up errors about url problems. See attached screen grab. Any idea what is causing this, and how i can get around it. Thanks.