↧
New GPS from CUAV
↧
Strange pitch roll glitches after yaw autotune
@Corrado_Steri wrote:
Did an autotune on yaw this afternoon and it completed without issues (previously i had done pitch and roll autotune without any prob). Problem is that now if i apply yaw on rotation stop it glitches on roll and pitch in a diagonal movement.
It can be clearly seen in the attached log at time 465.8s - 468.3s - 470s. If you look at pitch and roll against desired roll and pitch the glitches can be seen right in the moment the aircraft stops the yaw movement.Quad
25KG Auw
Hobbywing X8 motor+esc combo
30" Blades
12 S
AC 3.6.8Log: https://drive.google.com/open?id=1SUDaKMXeVSlibO2IZJD-WY8RVn7Zjp0o
Posts: 1
Participants: 1
↧
↧
Throttle UP when enabling enabling motor (interlock)
@GROOVY1975 wrote:
I am building my heliquad almost exactly as this one:
http://ardupilot.org/copter/docs/heliquads.html
I everything working, all servos work, but I have an odd issue, well maybe not odd but due to the Pixhawk 4 trying to level off. I dont want that, I want manual control as if flying one of my helis. I have flight mode set to channel 7 (tried 8 with same results). As soon as I “arm” the pix, then enable and disable my motor interlock, it powers up the single motor to almost full power with no control of throttle, it does not raise or lower with my throttle gimble.
I have it set to ACRO in mode 1 and STABILIZE in mode 2 (toggle of the switch tied to channel) because it seems to require something to be set. I dont want a flight mode really, I would like it to start the motor with my throttle as I increase the gimble, power is raised until a steady speed then my radio will lock the throttle, not the pixhawk (not have it automatically enable). Is there a way to disable flight modes, or have ACRO flight mode but without the motor going haywire? I just want control over the throttle
Posts: 1
Participants: 1
↧
Yaw control disabling during fast VTOL descents
@Illini_Rob wrote:
I fly Pixhawk 2.1 and Ardupilot (latest beta) on a QuadPlane-converted Parkzone Radian.
Recently I’ve been focusing on performing rapid inbound and outbound transitions because it’s super fun.
I found an interesting behavior.
I increased Q_VELZ_MAX (Pilot maximum vertical speed) to 150cm/s (1.5 m/s for us mere mortals)
The default value is 1m/s.I found that when I actually command maximum climb or descent, it disables yaw control.
That is, during a rapid climb or descent, it holds current heading no matter how far I deflect the rudder stick.
When I command less than full climb or descent with Q_VELZ_MAX set to 150cm/s, yaw control returns.
If I have Q_VELZ_MAX at the default value of 1m/s I always have yaw control.Is this a bug or a feature?
When doing inbound transitions from FBWA to Q_HOVER, I would really like to command a rapid descent rate while simultaneously kicking the tail around so I point into the wind.
If I do a crosswind or downwind inbound transition and lose yaw control, then I’m temporarily stuck in a hazardous tail-to-wind condition until I arrest my descent rate.Any ideas?
-Rob
 )
)Posts: 1
Participants: 1
↧
Motor failure crash on a hexacopter?
@Carapau wrote:
Has 3.6 had any update to how a motor failure on a hexacopter is managed? I’m linking this to a question I posted back in 2017 on Copter 3.5. I am hoping to build a 30kg max take off mass hexacopter but only if I know for sure that the Pixhawk Cube can deal with a motor failure. Thanks for any advice.
Posts: 3
Participants: 2
↧
↧
EZ WIFIBROADCAST Advice
@Syliaz wrote:
Hello,
I have 2 Rapsberry 3B and a 7 inch screen to make my station with ez wifibroadcast. I would like to have a range of about 9-10 km with my plane, with a delay of about 300 ms maximum.
Anyone have any wifi adapters or antennas to recommend?Do I need an antenna tracker?
Posts: 3
Participants: 2
↧
Ardupilot can be used?
@Jay_kishan_Panjiyar wrote:
can i use ardupilot for my project . is it still supported?
Posts: 7
Participants: 4
↧
Apsync for Jetpack 4.2 on Jetson TX2
@mtbsteve wrote:
I started to make some modifications to the Apsync code in order to make it run on the latest Jetpack 4.2 release along with Ubuntu 18.04.
While my focus is on the Jetson TX2, it should also work on a Nano. However for the Nano, it is still to be determined how to communicate with the FC.With Jetpack 4.2, no further kernel patches are needed for eg the Auvidea J120 board and the install process is significantly simplified compared to the 3.x versions of Jetpack.
Here is the link to the install instructions on my github:
The code is not perfect and not fully tested yet. Before I start creating pull requests to Apsync master I would appreciate if someone would be interested in testing the installation.
@peterbarker maybe you also could take a look.
Posts: 1
Participants: 1
↧
Advice on log with crash on takeoff
@froly wrote:
Hi everyone! I’ve experienced a strange crash immediately after catapult launch.
I have an elevon plane. Lately we updated firmware from 3.9.2 to 3.9.8 because of SB_0000002. At first takeoff with 3.9.8 something happened with pitch controller, plane dropped throttle and did a nosedive for no reason.
Log file attached: crash log
I would highly appreciate any possible advice!

Posts: 1
Participants: 1
↧
↧
Compass_DEC Understanding
@kkarl wrote:
Hi, I would like to know what the parameter Compass_DEC does and what effects it has if this value is not set in an RC boat.
What is the correct way to adjust this ?.
Is it mandatory to set this parameter?Thank you for your help, this forum is great
Posts: 2
Participants: 2
↧
Push Button with a Servo
@kkarl wrote:
Hello everybody,
Is it possible to use a Servo in a Mission, when it arrives at the waypoint it press a button and then goes back to zero position? I think about if …can use the camera shutter function?Thank you Kind regards
Posts: 5
Participants: 3
↧
Skidsteering boat
@tomyy wrote:
Hello,
I think it would be usefull if its possible to make a skidsteering version for a boat. In auto is sailing perfect but in manual is turning slowly. For boats, it would be pefect to turn with 2 motors. One in one direction and the other in the other direction. Is this possible? I couldnt find it. It would be great someone can help me with this.
kind regards
Thomas
Posts: 2
Participants: 2
↧
APM planner 2, not working with macOS Mojave or Sierra
@jimmymyres wrote:
Hey all,
Im new to Ardu pilot and APM planner 2. I have downloaded and installed the application to both my MacBook pro and iMac to receive an error message saying “this application is not compatible with my current version of OSX”My iMac is running macOS Mojave 10.14.4, and
my MacBook is running macOS High Sierra 10.13.3Has anyone had a similar issue, or know of a way around this? T.I.A
Posts: 2
Participants: 2
↧
↧
Strange brief uncontrollable incident during loiter endurance flight
@hsolano3 wrote:
Hello all in the ardupilot forums. Your help has been invaluable, and I hope that you guys keep helping people like me in this journey of discovery of the amazing CUBE controller and Ardupilot firmware.
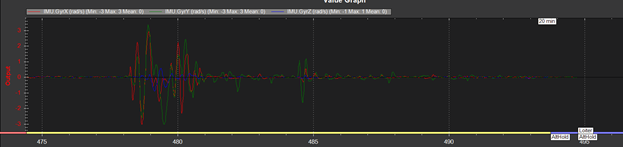
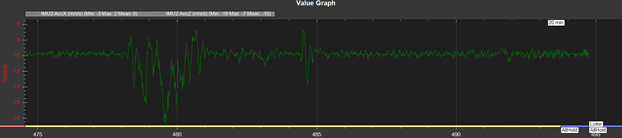
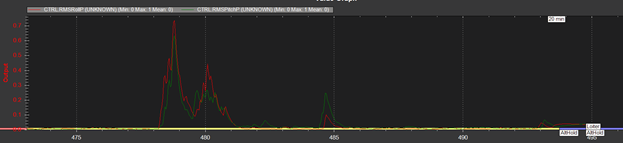
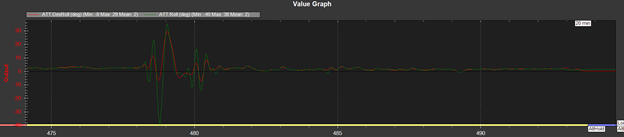
Yesterday, in a flight made to test the battery failsafe of the copter (which has a CUBE and the latest copter firmware to date), during an extended loiter, our pilot decided near the end of the run (after 19 mins) to give a small input to the copter (coaxial octo-copter), and right after the set of inputs the copter became out of control, as if something was wrong, for a total of approximately 3 seconds, after which, the copter regained stability, allowing us to ground the copter:
Gyro Readings:
Acc Z:
Pitch/Roll P (controller):
Desired Roll/Roll:
Desired Pitch/Pitch:
This event also triggered all kinds of issues, such as velocity/magnetometer variance triggers in the EKF, reduction of the satellite count in the GPS, voltage drop, but all of these I believe are just synthoms of the problem.
So far, the following are the possibilities I have been thinking about:
- Possible accelerometer gyro cross-coupling caused by the addition of a soft mount to the CUBE, since it used to experience very strong vibrations (we are aware that the recommendation is to hard mount the cube, but this frame is a large copter and vibrations could not be avoided).
![image]()
- Possible mistuning of the copter, which led to an unstable mode that almost caused the copter to lose control from the very specific input given. The copter was tuned using autotune at its most restrictive setting.
- Much less likely: error in the GPS/Compass reading due to the addition to the new Here2 module connected by UAVCAN protocol.
If the first possibility happens to be the case, is there any for sure way to see if there is a cross-coupling between gyros and accelerometers directly from the dataflash log? Because FFT doesn’t show anything meaningful above 25Hz (no 80hz peak).
Here is the log of the flight. Any type of input will be appreciated.

Posts: 1
Participants: 1
↧
SERVO output extreme in self-leveling flight modes
@KadaverJoe wrote:
I have built a new plane and set it up with an Pixhawk 4 and ArduPlane 3.9.5.
I set up my new plane and calibrated all RC inputs. All servos are set up correctly as well. So when I move the sticks of my transmitter in manual mode, everything works normal (if I put my roll stick half to the right, the aileron servos move roughly half their way).
But if I change to FBWA and move my roll stick not even half way, the aileron servos are at their maximum. When I look at the SERVO Output tab in MP, it shows the same pattern.
Is this really normal that apm responses so extreme?Thank you for your help.2019-05-25 16-48-05.tlog (146.3 KB)
Posts: 1
Participants: 1
↧
I can't bypass safety switch!
@ahmetomer wrote:
Hello,
All working well. I have set the EK2_IMU_MASK to 0 as my boat can’t be still when i boot the FC. However sometimes(when battery is very low) FC restarts randomly. and middle of the water i can not arm the device because of the hard ware safety switch.
Should i physically disconnect the safetry switch from the FC? I know it is a suggested failsafe but i can’t risk the boat!
Thanks.
,
here is my parameters!V3.param (13.3 KB)Second question : I have ordered a real ublox unit (neo8) from banggood(radio link neo 8mn with compass). It is a genuine product (real ublox module). And probably the best gps for the buck. However i don’t want to use the compass. I want to blend the gps’s.
But my initial gps is neo 6m fake unit. So they are not the same products. What do you suggest? Would gps blend give better results with 2 different supported gps units?
Today had 10 satellites with 1.0 hdop, it really didn’t have much drift. 3d gps lock was quite stable. But ordered anyways because my unit can only find 10 sats. I believe the results will be much better.
Any suggestions?
Posts: 10
Participants: 3
↧
Suggestion : Fonts
@Trollmale wrote:
Would it be possible to have the ability to choose our own fonts in MP ?
Cheers steve…
Posts: 1
Participants: 1
↧
↧
Yaw yo-yo with VTOL Tilt-rotor Convergence
@hurzburg wrote:
Just hovered my newly converted Convergence in my backyard…only issue is a +/- 30 deg heading yo-yo back and forth…any ideas what is causing that?
I am using the same compass/gps location and type as Greg Covey’s build, BN220…no slop in tilt mechanics…tilt trimmed to 90deg/0deg with servo min/max when in QSTABLIZE/MANUAL and no yaw input…same pids as posted in reference buildyaw control works fine…just slowly oscillates back and forth 30deg at neutral
Posts: 1
Participants: 1
↧
RSSI from channel 8 Failsafe
@zillion42 wrote:
Hi,
I’m setting up a new Air frame for my son and I’m using my old APM 2.6. From my understanding the last available Firmware that still runs on the APM 2.6 is Plane 3.3. So I hope I am in the right category.
I have a new receiver, the XM plus mini (2.4GHz Taranis) which outputs SBUS. I flashed the APM 2.6 internal PPM encoder to understand SBUS and all is fine, servos work.
Now I flashed the firmware for the XM+ mini to output RSSI on channel 8, and I can see it’s working in the Radio Setup of Mission Planner.
Obviously I would like Plane 3.3 to understand and read RSSI, so I can setup the long failsafe action. My current version of plane 3.3 does not offer me to choose a Channel for RSSI, so I figured I would try it manually, via Voltage reading. I am familiar with the:
RSSI_PIN and
RSSI_Range parametersNext I set RC8_FUNCTION to Pass-trough and tried to directly connect Output 8 with pin 5. Which doesn’t work.
Basically that is another cable, which is technically not needed and all I want is a proper RSSI reading, hope someone can help me out
http://ardupilot.org/plane/docs/common-rssi-received-signal-strength-indication.html?highlight=rssi
Regards,
Tobi
Posts: 1
Participants: 1
↧
Switching to auto mode with no mission ever loaded on drone causes loss of control
@Jose_Ortiz wrote:
Hello, I’d like to bring forth an issue. It seems that if a pixhawk 2 running ardupilot 3.6.8 doesn’t have a mission on it and you switch it to auto mode the whole drone loses complete control and crashes. and the only way the drone stopped was to wait for the crash to check in as I didn’t have a manual flight mode, only loiter, rtl, and auto.
Here is a log. We replicated the issue and recorded it. https://drive.google.com/open?id=1s3V4KO6kkoT896373cRDgs42cpXsrLVg
2019-05-25 15-40-40.bin (676.1 KB)
Posts: 1
Participants: 1
↧