@Autonomost wrote:
I am wondering if the Spektrum protocol SRXL is supported using APM? I cannot find a definitive answer.
Thanks for any info!
Posts: 2
Participants: 2
@Autonomost wrote:
I am wondering if the Spektrum protocol SRXL is supported using APM? I cannot find a definitive answer.
Thanks for any info!
Posts: 2
Participants: 2
@hernborc wrote:
I´ve assembled a skywalker with pixhawk for a friend that is making agricultural trials to use with a Tetracam camera. Its been working very well before but a few days ago it crashed. It looks like the elevator came off (its the new T-tail skywalker 1720). Dataflash logs show that before loss of control TECS demanded higher airspeeds. I have looked a few logs before but I cant figure out what is going on here. If someone would have a look it would be great to learn.
https://www.dropbox.com/s/xtlde75qlkfkbnv/65.BIN?dl=0
What I have looked is this. At around line 651000 it starts to loose altitud and at the same time there is an increase in airspeed (demanded also). By line 658500 pitch and roll start to diverge and from there total loss of control and spin to ground. What is not clear to me is if elevator loss might caused this or this high speed caused elevator loss!.
Cheers
Hernan
Posts: 1
Participants: 1
@Remi wrote:
Due to the cable routing on my plane I need to mount my compass backwards on the tail. Incorporating the already known Roll180 configuration of the compass, i also need a Yaw180 configuration.
Something like Roll180Yaw180 or Pitch180 (which I believe is the same thing).However, I can not find such a configuration for compass orentation. Is there something I am missing? Surely mounting the compass backwards isn't as weird as the many other alternatives which are supported.
Posts: 1
Participants: 1
@agreear wrote:
As stated in the documentation http://ardupilot.org/copter/docs/common-relay.html
"A “Relay” is an digital output pin on the APM or Pixhawk that can be
switched between 0 volts and either 3.3V (Pixhawk) or 5V (APM2).
Similar to a servo it allows the flight controller to invoke some action
from another device on the vehicle. In Copter, Plane and Rover, up to 4
pins can be defined as relays.""On the APM2, A9 (pin 9) is the pin that is recommended to be used as a
relay. In fact any of the pins from A0 ~ A8 may also be used as relays
but to use these you must manually set the RELAY_PIN parameter (to “0”
~ “8”) through the Mission Planner’s full parameter list.""On Copter 3.2 (and higher) the “First” relay can be controlled with the
Ch7/Ch8 switches."How do I enable ch7 to controls the relay on rover?
Any suggestions?
Posts: 2
Participants: 2
@muqing_cao wrote:
Dear all,
this is a general question regarding the code algorithm in attitude control. I have searched through the previous versions of arducopter and have found the attitude control structure of 2.9 as:
However, I have looked at the recent code closely and was not able to find the get_stabilize() function any more. Instead I found the thrust_heading_rotation_angle() functions that basically rotates the copter in roll/pitch to align the thrust line first, and then rotate the yaw angle (something similar to PX4).
Is this something that was changed recently? This seems to be major changes in code but I was not able to find details of this information from past few versions release notes.
Any comments are very helpful to me!
Best regards,
MQ
Posts: 2
Participants: 1
@kyuhyong wrote:
I ordered same l3g gyro (4mm x 4mm one)as used in pixhawk however markinng is different on the chip.
On the original pixhawk, it has AGD2 250S is written vs my hardware has AGD8 204(0? Or D?) marked as shown in below picture.I found solution for this. my mistake
Posts: 2
Participants: 2
@Yanshof wrote:
I build new drone F450 with pixhawk controller.
Because of budget problems ... I ran out of money and i could not buy a remote control.
I have a lot of experience with software develop so i decide to try to write a software that i will be able to control my drone F450 from my laptop.
After building all the drone - i connected the battery and try to connect the drone thru telemetry ( one side on the drone and other side on the laptop )
The connection work and i can see the drone parameters thru 'mission planner'.
But i can't take off.
I can't make the drone fly ...
I mean that i try to make the engine spin without propeller ... but this is not happening.
What i did wrong ?
Is it possible to make the engine spin on this situation ?
What to do next ?
Posts: 1
Participants: 1
@sgloor wrote:
Is there any way to add a parameter to give a burst of full reverse thrust after landing.
I have an application for a STOL landing with a fast pullup after landing. Full reverse would pull the plane up quickly.
I can reverse ok in the pre-flare and that is working well however with an electric plane with an undercarriage a parameter such as REV_ON_TOUCHDOWN would be useful. A non-zero value runs full reverse for the length in seconds of the value.
Posts: 1
Participants: 1
@coni99 wrote:
Hello,
I have DIY assembled an Y6 multirotor running on Pixhawk. I've done
several test flights with AUTO mission used for photogrammetry grid
with 75/75 overlap and using A5000 camera remotely triggered by Pixhawk
using CAM trigger messages. Now normally this solution works great on
other Pixhawk based drones but this one has a particular problem: each
flight there are more CAM messages recorded in the log than the actual
number of images recorded by the camera. Now I wonder what could be the
problem source.. The only thing that came to my mind is that Pixhawk
actually triggers CAM messages (using CAM_TRIGG_DIST command) even
before the first waypoint of AUTO mission is reached. This could happen
when the AUTO mode has been triggered before the first waypoint is
reached. But I have no way of how to find out if this is true or false
because I cannot geotag images (CAM vs. Image numbers don't match). I
always get lower number of images from the camera than the number of CAM
messages. Can you please confirm my suspicion ? Logs here:
https://drive.google.com/open?id=0B0VZlBaoFwO-czQ2MHhDcEZzTDA
https://drive.google.com/open?id=0B0VZlBaoFwO-cW1IcFJHRjNubDg
https://drive.google.com/open?id=0B0VZlBaoFwO-cmE4ZHNEWWJiTjAThe time between the images is 1s so this should not be a problem for the camera.
Thanks
Posts: 1
Participants: 1
@Yanshof wrote:
I build new drone F450 with pixhawk controller.
Because of budget problems ... I ran out of money and i could not buy a remote control.
I have a lot of experience with software develop so i decide to try to write a software that i will be able to control my drone F450 from my laptop.
After building all the drone - i connected the battery and try to connect the drone thru telemetry ( one side on the drone and other side on the laptop )
The connection work and i can see the drone parameters thru 'mission planner'.
But i can't take off.
I can't make the drone fly ...
I mean that i try to make the engine spin without propeller ... but this is not happening.
What i did wrong ?
Is it possible to make the engine spin on this situation ?
What to do next ?
Posts: 1
Participants: 1
@Peterev wrote:
I have a Spyder 700 running T-Motor U5 motors X8 with 15" props and I wondered if anybody knows what on folding props causes, or more precisely what I need to try to reduce, vibrations on the Z axis. You can see the difference between one piece and folding props in the graphs. I just love the ease of use that folding props gives you..
Thanks.
Posts: 1
Participants: 1
@agreear wrote:
# python mavproxy.py --master=/dev/ttyACM0 --baudrate 115200http://ardupilot.github.io/MAVProxy/html/modules/relay.html
I have successfully set up mavproxy on a raspberry pi and have connected to the APM. I can turn the relay on using mission planner commands.
I sent to following command to the APM.
"relay set 0 0"
(using false or NPN logic)The relay state does not change.
I also tried
"relay set 0 1"
The relay state did not change as well.
Is there something I'm missing?
My goal is to turn on relay 0 using mavproxy.
Posts: 1
Participants: 1
@wicked1 wrote:
Has anyone noticed their compass drifting?
Today during a mission, the copter started toilet bowling, badly. My copter was physically facing north, but in MP, it showed it facing west. I landed, rebooted and then north was north again. But I watched it in MP for a few minutes, while the copter was sitting on the ground. It showed the copter yawing about 45 degrees towards the west, then slowly over to the east, and then back north again. But the copter was always sitting still on the ground facing north.
I came inside to look at my logs, didn't find anything. Went back out 1/2 hour later, and it was fine for the 15 minutes I was flying.Any idea what might cause that?
Posts: 2
Participants: 2
@wicked1 wrote:
After compass calibration, all 3 compasses show a value.
However, if compass 3 is enabled I cannot arm. I get the "compass not calibrated" error.
As soon as I uncheck #3, I get the beep beep beep chimes, and can arm.
I'm just curious if this should be working yet. #3 gives me better offsets than #2.
Posts: 3
Participants: 2
@hamid_didari wrote:
hi guys
I have recently added a parameter to Ardupilot using http://dev.ardupilot.com/wiki/code-overview-adding-a-new-parameter/ as a guideline. Somewhere on these boards but I can't see my new parameter in full parameter list in mission planner. what would i do to see my new parameter in mission planner?
Posts: 2
Participants: 2
@ILAP1 wrote:
Mission planning question: is there a method to plan a grid mission where the parallel grid lines are curved? I want to fly a mission over a road and follow the curves. Setting manual points won't work since I need to fly 3-4 parallel curves for covering the width of the corridor.
Posts: 2
Participants: 2
@Vorona wrote:
Hi all!
I have a trouble.
I have very simple joystick without mapping channels and APM mini with AC 3.2.1 - heli. In wiring diagram I see, that connection is not direct (Direct connection is only for 1,2,4,5 channels). I whant to use 3-wire connection (PPM mode). In this mode PPM signal gets without any changes. How I can swap channels in APM?
I tried to change code in radio.pde:
g.rc_1.set_pwm(periods[rcmap.roll()-1]);
g.rc_2.set_pwm(periods[rcmap.pitch()-1]);
set_throttle_and_failsafe(periods[5]);
set_throttle_zero_flag(g.rc_3.control_in);
g.rc_4.set_pwm(periods[rcmap.yaw()-1]);
g.rc_5.set_pwm(periods[7]);
g.rc_6.set_pwm(periods[6]);
g.rc_7.set_pwm(periods[4]);
g.rc_8.set_pwm(periods[rcmap.throttle()-1]);and in GCS_Mavlink.pde:
static void NOINLINE send_radio_out(mavlink_channel_t chan)
{
mavlink_msg_servo_output_raw_send(
chan,
micros(),
0, // port
hal.rcout->read(0),
hal.rcout->read(1),
hal.rcout->read(5),
hal.rcout->read(3),
hal.rcout->read(7),
hal.rcout->read(6),
hal.rcout->read(4),
hal.rcout->read(2));
}
Logic is works, but in mission planner, radio calibration tab I see direct connections, so that is prevents right calibration process. I think, that information about channels periods to MP sends 32u2 PPM encoder. But I'm not found place in code, where it happens. Please, help me found this place.
Posts: 1
Participants: 1
@J.Leite wrote:
Hi Every one.
I am very new on autopilots, I am puting together a boat and after purchase the autopilot, I noticed that I need to upload the firmware. The software offers some otion for firmware but none of them are for boat. I would like to ask if any one knows what is the correct firmware that I need to choose to load in the autopilot to use in the boat?
Posts: 4
Participants: 3
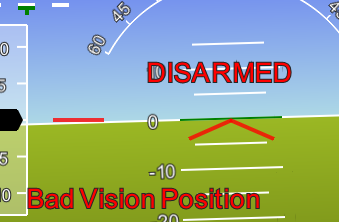
@umbraclet16 wrote:
I want to use IR-Lock to achieve precision landing, but encountered a few problems.
I modified the default value of enabled and _type in ACPrecland to avoid modifying parameters on GCS. However,
after I loaded my firmware, I found that PLND_ENABLED is still 0, i.e. disabled. But when I use another pixhawk, my firmware works. So, what could be the problem with the first pixhawk hardware?After I set PLND_ENABLED and PLND_TYPE, MP hud displays 'Bad Vision Position'.
This does not disppear when I connect Pixycam5 to pixhawk through I2C.
I've tested that Pixycam works fine, and the i2c connection is accordant with ardupilot document.
So what's the problem? Wrong pixycam firmware or something?
Posts: 1
Participants: 1
@Fossdal wrote:
Hi i am making a LogAnalyzer that parsed DataFlash logs (.bin)
I have dificult finding what structure of messages 0- 128 arewhere can i find them ?
i have found these
LOG_CTUN_MSG=0,
LOG_NTUN_MSG=1,
LOG_PM_MSG=2,
LOG_STRT_MSG=3,
LOG_SONR_MSG=7,
LOG_ARM_MSG = 8,
LOG_OF_MSG=10,
LOG_QTUN_MSG=11,
LOG_STAT_MSG=22,
Posts: 1
Participants: 1