hi please need a help, opical flow not work PX4FLOW V1.3.1.
my copter f450, pixhawk 1 radiolonk, firmework 3.6.10
with gps work well, i want use optical flow for inside.
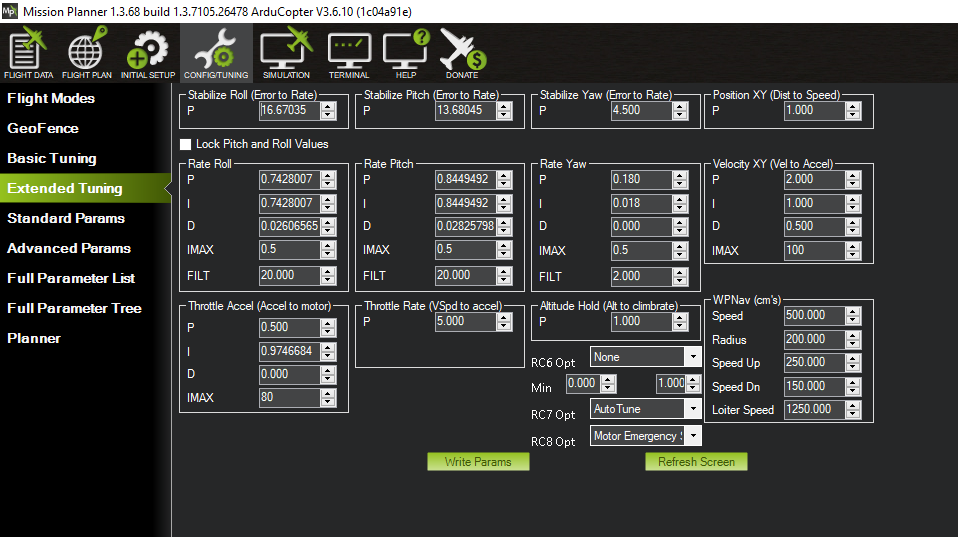
after configuration the optical flow and test i can’t fly loiter mode or position hold (disable to switch), althold can’t increse the throttle. stabelize no problem. https://drive.google.com/open?id=1BOgeDhqxo-nbLObiW9tsoZp7KiewgClQ
Copter-3.6.11-rc1 has been released for beta testing and should appear in the ground stations within a few hours of this post. The list of changes is available in the ReleaseNotes and also copied below.
Changes from 3.6.10
EKF and IMU improvements:
a) IMU3 enabled by default if present
b) IMU3 fast sampling enabled by default on Cube autopilots
c) EKF protection against large baro spikes causing attitude error
d) EKF origin fixes (consistent across cores, set externally only when not using GPS)
e) EKF logging of 3rd core
Minor enhancements:
a) Land mode supports heading requests (ie. ROI)
b) Support Hexa-H frame
c) MatekF405-STD binaries created
d) Benewake TFminiPlus lidar support
Bug Fixes
a) Barometer health checks include sanity check of temperature
b) Lightware serial driver handles invalid distances
c) IO firmware fix involving delayed writes to serial ports (ChibiOS only)
d) CAN Compass fis to for unintialised device IDs
e) mRo x2.1-777 USB ID fix
f) ChibiOS fix for I2C storm
This point release has a number of important reliability fixes including 1c (EKF protection against large baro spikes) and 3f (ChibiOS fix for I2C storm) but we have seen at least one incident of each across the vehicles (Plane, Copter, Rover).
For Benewake TFmini-Plus lidar users, note that you’ll need to set RNGFND_TYPE = 25, RNGFND_ADDR = 16.
Any beta testing and feedback that you can do is greatly appreciated!
The author rates is as having a good chance of passage and implementation. Most interestingly,
“Indirectly this bill would impact many other corners of the sUAS ecosystem because DJI is the de facto industry standard. A large portion of the sUAS software industry is reliant on their APIs and SDKs. This would slow their growth as well since it is predicated on selling licenses. Over time, this would encourage software development - there is a growing global Open Source community. And there are very few Part 107 pilots (RPICS) with experience on anything but Chinese drones.”
Hi guys,I flash the Rover 3.6.0 firmware into pixhawk4 than the pixhawk4 was not working correctly
here is my command
cd ardupilot
./waf configure --board pixhawk4
./waf rover
./waf --target bin/ardurover --upload
hi everyone @Leonardthall
really stocked with copter 3.6.10 autotune i was able to autotune my aircrafts without any problem in copter 3.6.9 but with this version i always have oscillates after autotune .
because of too many problem and modification i was did a full parameters wipe and configure this hexacopter from over
i did everything in tuning doc step by step http://ardupilot.org/copter/docs/tuning-process-instructions.html
my copter was flies ok after tuning-process-instructions without any oscillates
but after autotune i have heavy oscillates in loiter, althold, stabilize
note : i didnt change input shaping parameters because i dont know that i must reduce these values or directly change input shaping parameters ?
Hi everyone, as the title said, I had a in flight Pixhawk reboot, resulting in a forced landing… sort off.
I have CUAV Pixhack v3, external mag and airspeed sensor, mounted in a tri motor Vtol.
I had already done about 5 short testing flights on this without incidents, until today when the midair reboot happened.
I was lucky enough to have the plane rather close when I noticed the motors stopping in FBWA mode. Not knowing what happened, I switched to Qstab to save it, since it was about 5m high. It switched modes and the motors started, allowing me to bleed off speed and to get it closer to the ground. This did not lasted long, at about 2m high the motors stopped again and I heard on the telemetry “Throttle Disarmed”. Of course it plunged nose down but it’s not too bad, just the tilt servo mounts and a prop broke.
Checking the logs I see the log stopped and than another one started getting the data from the quick descent.
So, let me attach the logs, maybe someone have a better idea about why this happened.
I am unable to connect my V2700 to any other GCS for android other than SV 2.0. All firmware is updated. on QGC connection is never established and on MP the app crashes after hitting connect. I set them up on UDP at 14550. I am able to connect via PC just fine. I haven’t changed to MAV link 1 since everything i have read suggests that the newest versions of the apps are able to use MAV 2. I really want to use either of these apps as the map view on SV2.0 is trash and has a short list of available functions. Thank You.
I am looking for a cheap way to measure my altitude (when 0-2 meters) with minor error rate.
I have encountered that sharp sensor and it gives analog output voltage between 0-5V within 20-150cm range.
Datasheet: pdf.direnc.net/upload/gp2y0a02yk-e.pdf
Is it possible to use it with APM 2.8?
Another question: is APM series deprecated and/or no longer supported? what have they been replaced?
I own a pixhawk 2.4.8, tried several firmwares (1.9, 3.6.10, 3.5.3) and could not find the servo gripper function.
I’m trying to do a mission where the drone take off, go to the destination, land, open the servo system and take off plus RTH, but I can not make this happen. The closest we got was the drone taking off doing the mission, land, but couldn’t release the package.
The servo work with manual control on the radio, works on the MP as a camera trigger or as normal servo.
Pixhawk 2.4.8. Upon takeoff copter spins at approx 2 rotations per second either CW or CCW, but stays perfectly level. At takeoff, I can influence the direction of rotation by giving a small amount on the yaw stick but once it starts it won’t stop and the yaw stick has no influence. When it lands going back to idle I can reverse direction. I just transferred the Pixhawk from a quad that had no problems to a new frame with a 4 in 1 ESC. Any advise?
I am wondering what the best way is to get a copter to follow a vehicle that is not part of the ground station? For example, if I am on a boat with mission planner, and I want the copter to follow another, different boat without having to manually update the target’s position.
Is there a way in mission planner to dynamically update waypoints for the copter to follow in auto mode? Said another way, is there a way to have a ‘follow me’ type mode that follows a target vehicle instead of following the ground station?
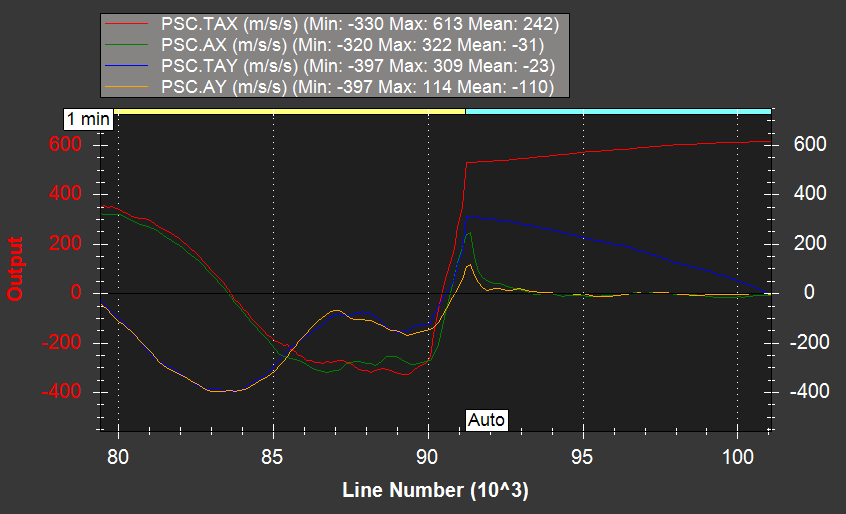
Found out that flight mode change upsets position controller badly if there is large velocity difference on target and current velocities.
Firmware version: ArduCopter 3.6.9 ChibiOS
What’s untypical on parameters:
Maximum flight speed on loiter is 12m/s where as maximum default speed on waypoint navigation is 2m/s.
What happened:
The drone was flown about 9m/s on LOITER flight mode when AUTO flight mode was activated. The drone flied 90 degrees off from correct direction, while slowing down to 2m/s.
I’m using the SwiftGust version of the Gazebo plugin for connecting with the ArduPlane SITL, however, upon connection the fixedwing model gets motor control messages from ArduPlane and starts moving without the firmware being armed. Has someone else experienced this, and how did you fix it? I’m guessing there might be something in how I’m launching the SITL, but I’m unsure.
Edit to note that I’m not seeing the same issue with Copter, only Plane
Thought I’d start a thread based on a new concept I’m working on. Basically, this is a reverse tricopter using the QuadPlane code with a twist. At the centre of the frame, I’m adding a EDF unit at the centre (C.G) that will provide (some) vertical thrust in QHOVER and then rotate to horizontal position for foward flight.
I have succeeded in getting the tricopter to hover (with tail rotor facing forward). The question I have for the Dev team, how can I drive the EDF in hover so that some thrust is derived from throttle position and then rotate the EDF when switching into forward flight? The EDF will provide forward thrust in cruise. Wings not shown in image.
Today we’ve test pixhawk v4 on S900 frame. Yaw angle is drift so large2019-09-24 17-13-17.bin (264 KB)
when get 3D fix and EKF. At last time we try hard, when i could not regain control i had done Disarm, it suddenly raisedthrottle and spin, then EKF velocity got serious error then crash. After test flight today, we have broken 6 propellers. Please help me to analysis log files. Thank you.
Logging files: 2019-09-24 17-09-20.tlog (586.9 KB) 2019-09-24 17-13-17.log (521.1 KB)