@Leonardthall wrote:
This is a group to discuss any alt hold anomalies seen in the release of copter 4.0.
Please provide data flash logs, video’s and use the following logging settings.

Posts: 1
Participants: 1
@Leonardthall wrote:
This is a group to discuss any alt hold anomalies seen in the release of copter 4.0.
Please provide data flash logs, video’s and use the following logging settings.
Posts: 1
Participants: 1
@memart wrote:
Hello,
Went to fly my x4 last week for the first time. This is a large 1600mm (very lightweight) quad using a Pixhawk, running KDE 135 motors and Tmotor Alpha ESCs.
Performed two quick tethered flights. Both times the drone took off and hovered fine, but making a slight pitch caused the drone to oscillate and twitch tremendously and luckily was stable enough to land on all 4 legs.
Pulled the flight logs and performed an auto-analysis, this is the report:
Vehicletype ArduCopter
Firmware Version V3.6.9
Firmware Hash 632be63f
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:-122.06, Y:94.98, Z:-368.26)
WARN: Large compass offset in MAG data (X:-122.00, Y:94.00, Z:-368.00)
Large change in mag_field (109.85%)
Max mag field length (690.38) > recommended (550.00)Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.46, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1351, 1310, 1333, 1314]
Average motor output = 1327
Difference between min and max motor averages = 41
Test: NaNs = FAIL - Found NaN in CTUN.DSAltTest: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log dataI am very new to analyzing logs but the compass test = fail which is disconcerting and am wondering if these oscillations are from the large offset in compass or just that the PID tune is just terrible. What is the easiest way to tell or how can you really tell from the logs?
Here is the flight log: Initial Flight Log
Here is the parameter file: Initial Param File
Posts: 1
Participants: 1
@sgopi wrote:
Hi there,
I was hoping that someone could help me out with determining whether my quadplane is in a quadrotor flight mode during autonomous flight (i.e. during the course of a flight plan uploaded from a GCS). I need to make use of MAVLink to communicate with the pixhawk flight controller using an arduino microcontroller. I know that it is possible to query the flight mode (i.e. QHover, QStabilised, FBW-B, etc) via MAVLink when flying using RC but I am still unsure as to whether this is applicable for autonomous missions as I suspect that the controller doesn’t switch between these modes for VTOL Take-Off and Transition commands in flight plans.
Any clarification and/or help would be greatly appreciated.
Posts: 1
Participants: 1
@hanzichi wrote:
Hello - Is it possible to run the SITL in a debug mode? I would like to be able to set breakpoints in the autopilot code while I simulate a flight. I am currently executing the SITL via sim_vehicle.py which seems to be compiling and running the flight code, model, etc. Thanks!
Posts: 1
Participants: 1
@11113 wrote:
Hello, Guys.
I wrote the post about ‘Can’t Recognize Parameter Value’.
(That Post’s URL : Can't Recognize Parameter Value)
There was an error in my previous post.
I wrote ‘can’t recognize parameter value’, but it turned out that the GPS compass was not recognized.Because I wanted to solve the problem, I kept the drone under the same conditions.
I have set the parameters of the drone so that they can fly.
And I’ve confirmed that the drones do both manual and automatic flight.
After that, I stored drone for 50 days.
I confirmed it on day 51 by connecting the drone with the mission planner.Immediately after the power was applied, the status indicator of the FC did not turn on after the yellow LED flashed two or three times.
The connection to the mission planner continued to work well.
And the message ‘PreArm: compass not calibration’ will appear on the initial screen.
I checked the compass that the FC recognizes on the Compass tab. However, I noticed that the FC did not recognize the compass of GPS(Here2).
After several firmware reinstallations, the GPS compass was finally recognized.I don’t think there is a problem with the firmware, but I would like to know if the same thing has happened.
If you know about this issue, please let me know any information.
I wait for your reply.
Thank you.
Posts: 1
Participants: 1
@tridge wrote:
I’m delighted to announce that the ArduPilot Developer Conference for 2020 will on on March 27th to 29th in Canberra, Australia.
This is the 4th year we have held this conference and it is looking like it will be bigger and better than ever. We have a new, larger, venue and a already have a long list of attendees.
This is a developer conference and the focus is on developer activities and planning for the year ahead. All ArduPilot development team members are very welcome along with all ArduPilot partners. Others are welcome by invitation. If you would like to come then please contact me either as a PM here or via email at andrew-conf2020@tridgell.net
New Venue
This year we are moving the venue to the Kurrajong Hotel which gives us more space.
Just a few minutes walk away is the Canberra lake, where we look forward to testing some ArduPilot boats
The hotel will also be providing buffet lunches to keep us going.
We also have a new flying site at the Spring Valley research farm to the west of Canberra. This will be a great site for test flights and we look forward to welcoming everyone for both the flying and social events.
You can see the talks from the 2019 conference here in our playlist here:
https://www.youtube.com/watch?v=mHrqZkXiy-4&list=PLC8WVaJJhN4wApCP6BkbDKQL_TkVHQqmy
Conference Format
The format of this conference is deliberately quite informal, with members of the developer team giving presentations on their work over the past year along with their plans for the upcoming year.
This time around we are expanding the main conference to 3 days, with the first day (the Friday) focusing on the very important topic of our documentation.
We also have a tradition of several days of pre-conference intense development and testing, with many of the attendees coming several days early to work closely together.
The dev team look forward to seeing many of you in Canberra in March!
Posts: 2
Participants: 1
@Noah wrote:
I am trying to understand what the differences in firmware are between PX4 and the Ardupilot firmware. I have a video system that seems to only want to work with the PX4 firmware on telem1 of my Pixhawk for OSD. If I try using the Ardupilot firmware than it doesnt want to work. I am confused as to how this is happening. They both use Mavlink1/2 for communication, so why are the outputs different.
Posts: 2
Participants: 2
@DEVESHTARASIA wrote:
Due to not knowing better, I bought the Pixhawk 2.4.8, which I come to realise now is a chinese copied version of PixHawk 2.4.6. But anyway, I am trying to setup the PixHawk with ChibiOS ArduCopter 3.6. Whenever I run sim_vehiclel.py, the compass starts going crazy and just switches directions randomly. If I try to reboot the vehicle or refresh the parameters, the compas then stops working.
The ground control station software I am using is QGC(latest). The OS is Ubuntu 18.04. If I try to calibrate the compass(while the sim_vehicle.py is running) error is: MAV_CMD (42424) command could not be sent.
Posts: 1
Participants: 1
@Lorenzo_Pessah wrote:
I have a very strange issue on one of our system:
We perform compass calibration, than compass_mot. Full restart of everything and put the drone in flight.
For few flight in the morning everything is perfect. EKF compass magnitude is always very low, even in extreme maneuvers I can’t see more than 0.5 ( green bar)
In the afternoon, I took off, push forward ( elevator) and the drone didn’t follow a straight line, but veering on the left. Opposite maneuvers and it veering on the right.
We run AC 3.6.10 with LIS 3 compasses.
We have multiple aircraft that are exactly the same and don’t shows the same behaviour.
Posts: 1
Participants: 1
@111123 wrote:
Hello everyone,
i am currently working on building a skid steering rover,but i am definitely missing something here.It is a skid steering vehicle and it needs to relay pins to work properly,so i read that the default relays are relay1 and relay2 ,after making all the connections i tried auto mode to see what happens,but there is no response from the relays,therefore i am trying to find a solution on how to enable the two relays,from mission planner without having to give the command from the RC controller,
Thank you !
Posts: 1
Participants: 1
@Dmase wrote:
I posted this in the mission planner category earlier but had no response, so I figured this might be a better location.
Basically,
I just received a pixhawk 2.4.8 with a 915MHZ radio telemetry module. After plugging it in to my laptop and turning on the pixhawk windows wouldn’t recognize the telemetry module. After a great deal of trouble with drivers I manged to get my PC to detect the usb side of the telemetry as a COM. I figured this would be the end of it and the thing would work properly. The telemetries seems to be communicating with each other since I can load settings and upload firmware via the initial setup tab of mission planner but whenever I try and connect to the pixhawk I get a ‘no heart beat packet received’ error. My baud rate is correctly set at 57 and I can communicate with the board through a direct usb connection, so i’m not sure what the cause of the error is stemming from.Could this still just be a driver issue, or is it related to my hardware/FC? Does anyone have experience with this issue or no how to resolve it?
Thanks.
Posts: 1
Participants: 1
@imfatant wrote:
Hi,
I’m using a Taranis QX7S running OpenTx 2.3.1 with Crossfire Tx (full) and I’m setting up a wing with a Matek F765 running ArduPlane. All softwares are up to date.
Specifically, I’m asking about what is displayed on the Taranis TELEMETRY page (12/13). Hdg (F765 compass) and Alt (F765 baro) are not displaying any data, but Ptch, Roll and Yaw are fine, updating nicely at 10 Hz.
The Crossfire is paired via Bluetooth to a laptop running QGroundControl, and there, Heading (F765 compass) and Altitude (F765 baro) are displayed fine.
Could someone tell me where to look to fix this?
Thanks
Posts: 1
Participants: 1
@bjames3 wrote:
Hello, to request a single parameter you need the param_id or param_index.
Where do you get this information from? Must you do a
PARAM_REQUEST_LIST first to get a list of all the parameters then parse out the one you want?Thanks!
Posts: 1
Participants: 1
@Asher wrote:
In an earlier post: Hexa with Cube Black on 3.6.10 (and 3.6.8) spaz in loiter mode then restablizes
We were diagnosing the fact I did not tune my copter…
Well, I have fixed that problem and now have my eyes set on figuring out what is causing the mechanical yaw bias in my hex.
Using the mission planner motor test, I spun each motor with props on at 15% and with a camera and counted how many frames/ prop revolution. They all fell between 17-18 frames (at 240fps if anyone cares) so I (think) I have ruled out the possibility of one prop causing more drag than the rest, so now I need to figure out which motor is off balance.
Here are the pics of the motor arms and how they mount to the frame. They’ll show there will be difficulty in tweaking the angle just a few degrees to try to fix it.
https://drive.google.com/drive/folders/1tFI2uAFW08DRWABt0Yb60jdJePSz0m6X?usp=sharing
So finally the question is, how can I experimentally verify which motor is misbehaving so I can try to fix or replace it? Are there any pro-tips on how to make sure the motor surfaces are all planar on a big drone like this?
Thanks,
Asher
Posts: 2
Participants: 2
@sridharanNH wrote:
Hello. I am very unclear about the partitioning of functionality between SITL and X-Plane, in the setup: Mission Planner <> ArduPlane/SITL <> X-Plane. When I use X-Plane by itself, I know that it is responsible for computing the physics of the flight as well as the rendering and animation. I also know that my X-Plane plugin can deliberately screw up the animation of the control surfaces without affecting the physics computations. And I can understand what Mission Planner is used for, but looking at what is exchanged between SITL and X-Plane, it seems that ArduPlane/SITL already does the physics and sends the results to X-Plane. How does X-Plane know that it should not do the physics? Or, does it not matter? I have tried to look into the ArduPlane/SITL code to get an idea, but it is just too complex. Using gdb to set breakpoints and examining stack traces is excruciating and feels like I’m groping in the dark. I’ll greatly appreciate any help getting some clarification in this matter. Thanks.
Posts: 1
Participants: 1
@Andre-K wrote:
I wish to start VTOL, fly 11m/s fast to where survey starts
Then fly the survey at 6m/s
Then return, fast.You may think mission would consist of:
-defining a VTOL with hover speed at 11m/s
-Takeoff
-Waypoint 1 near start of survey area (speed 11m/s)
-Survey (have no speed defined… so how to make sure it will fly at 6m/s) ?
-Waypoint 2 near home, (speed 11m/s)
-landAnd now the big question:
half way thru the mission, battery needs replacing, QGC had great pause/replace/resume features for a long time, but how will it handle the “fly fast to/from the area of survey ?”
Posts: 1
Participants: 1
@wynn4 wrote:
I have several custom vehicles which are identical in geometry, mass, and propulsion systems. I would like to be able to do an AutoTune on one vehicle, and then simply copy that tune onto the others. So far when doing this, I have just been taking a screen shot of the Extended Tuning page under the Config/Tuning tab in Mission Planner, and then copying these values onto the other vehicles.
So here’s my question: Does the data on the Extended Tuning page capture all of the parameters that are affected during the AutoTune procedure, or are there other parameters that are changed too?
Posts: 2
Participants: 2
@pauljatherton wrote:
Trying to figure out why I can not Read WPs successfully when connecting MP to Plane ( various 3.9 versions) via my LRS system (ULRS which provides 19.2k baud UART between Tx/Rx). Plane is configured with Mavlink v2 (have tried v1 also). MP on tablet (latest version as of today) connects over wifi to a ESP8266 board wired to the UART of my ULRS transmitter (back of Taranis), and the ESP is running the Tridge ESP code successfully (have tried both AP and STA modes with same results.
I can connect MP just fine and the parameter download at first connect is actually quite quick (very impressed with the ESP8266 code actually). I can write WPs for a new mission to the plane perfectly - quick response in fact, but can not read them back - it fails every time! The only way I get a successful WP read is if I connect over USB cable. To reiterate I am limited to 19200baud on this data connection.
I think my question is this - what is different about reading WPs compared to reading parameters generally, which could make the read operation far less reliable for WPs?
Posts: 2
Participants: 2
@DomenicoPatella wrote:
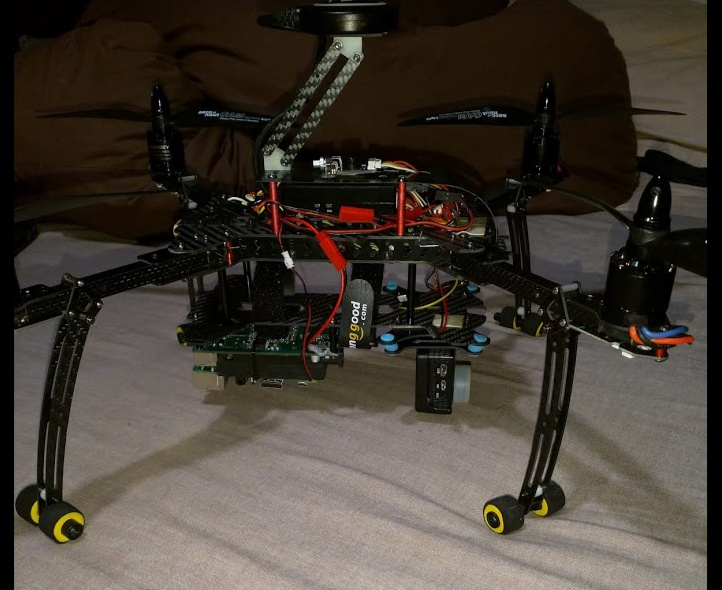
I successful build a quadcopter capable to comunicate with LTE Modem, Raspberry PI3 and encoder HDMI
An Hardware encoder is used to compress an HDMI input to H.264 format
The protocols supported are : HTTP, RTSP, RTP, TCP, RTMP ,RTMPS , HLS, UDP multicast, unicast
Encoded size: Up to 1920*1080 60FPS
Video bit rate:5-60 fps
The VPN is created by ZeroTier , an awesome service to create a virtual lan in one step !
You can install on different platform , is available for Android/Windows/LinuxRaspberry run on Apsync image , and some changes are necessary
- Apsync installed on RPI3
- Disabled Wifi radio to prevent interference with RC 2.4G receiver
- Enabled port forwarding
- Added Iptables to route Encoder HDMI web configuration
- Added a Gstreamer pipeline to stream video from Encoder (RTSP) to UDP
I tested telemetry and streaming on QCG (Android and Windows )
Streaming video also available on http ( VLC)I’m pretty satisfied about the result ,the outdoor test is ok. The target were to have an HD streaming and telemetry without buy expensive radio devices. In the past I tried Wifibroadcast but I think is more easy and powerful assembly an LTE system.
Of course there are cons (3G/4G signals , latency ) , but in some situation can be considerate as alternative to other radio systems and theoretically it has an unlimited range.
Posts: 1
Participants: 1