@autoboat wrote:
Does the rover code offer the “fast” waypoints option like copter does?
Posts: 2
Participants: 2
@autoboat wrote:
Does the rover code offer the “fast” waypoints option like copter does?
Posts: 2
Participants: 2
@okok wrote:
Holybro Mini Pixhawk4 Flash Ardupilot 3.6.12
it Very Good
https://youtu.be/O288uiublEA
Posts: 1
Participants: 1
@CraigElder wrote:
Issues & Pull Requests
- Jaime Serial Issues
Plane
Copter
Rover
Posts: 1
Participants: 1
@stephendade wrote:
To make it easier for users to find Ardupilot Service Bulletins, I think it would be worth setting up a dedicated forum section for them, much like how the CubePilot Forums do. The current practice of putting the bulletins in the General Blog section tends to have them drowned out by newer posts pretty quickly.
[On a side note, how are we tracking the status/resolution of service bulletins?]
Posts: 1
Participants: 1
@Andersson_Beccari wrote:
Does anyone could give a direction of how to:
1- Spray Drone to detect no liquid on tank and go home? ( I have the sensor)
2- To save the point where tank is empty, go home and then go back to the “Brake point” and keep doing the mission?
Hard?
Posts: 2
Participants: 2
@wcfung1 wrote:
I recently flash Arducopter 3.6.5 to my Open Pilot Revo board running ChibiOS. The Revo is installed in a 250 size quad. The quad behaves quite normal and steady in STABILIZE mode, but experience obvious TBE when switched to LOITER mode.
Pls see this link for the quad photo :- https://drive.google.com/file/d/1mpdAmyfDwooeez2TvZGp2nWvVWsNFaqU/view?usp=sharingThe param is also attached for trouble shoot.Quad 250.param (13.8 KB)
Thank you for any help.
Posts: 1
Participants: 1
@Giorgio_Rinolfi wrote:
With our hearts to Ardupilot community, thanks to all the dev because this amazing project enable us to realize this swarm platform, hw ans sw side. Yes its all AP based !!
Here a little video with 5 to 8 luminousbees to send you our best wishes for a special winter holiday 2019!Christmas is in the Air from Luminous Bees
All the best from Italy!
Posts: 1
Participants: 1
@pperrin wrote:
Just joined to ask this.
I am running windows 10, and am just setting up ArduPilot for the first time ever. I already had github setup, but had to install vmbox and vagrant…
When I try to initialise the VM I get…
Bringing machine 'bionic64' up with 'hyperv' provider... ==> bionic64: Verifying Hyper-V is enabled... ==> bionic64: Verifying Hyper-V is accessible... ==> bionic64: Box 'ubuntu/disco64' could not be found. Attempting to find and install... bionic64: Box Provider: hyperv bionic64: Box Version: >= 0 ==> bionic64: Loading metadata for box 'ubuntu/disco64' bionic64: URL: https://vagrantcloud.com/ubuntu/disco64 The box you're attempting to add doesn't support the provider you requested. Please find an alternate box or use an alternate provider. Double-check your requested provider to verify you didn't simply misspell it. If you're adding a box from HashiCorp's Vagrant Cloud, make sure the box is released. Name: ubuntu/disco64 Address: https://vagrantcloud.com/ubuntu/disco64 Requested provider: [:hyperv]Typing the address into a browser takes me to the release - so I have connectivity…
Any ideas what I can try next?
Thanks
Posts: 1
Participants: 1
@sparkyincali wrote:
I am using mission planner with plane and had a question about how to make sure I get all the terrain data. I dont fly autonomus missionsbut want to make sure I get the terrain data for RTL.Currently when I want to go to new areas to fly I create fake missions to cover the entire area I plan to fly. TO do this most effeciently I wanted to use the sinple grid oprion to make the waypoints.My question is what is the max spacing I can have for line spacing and spacing inline to make sure all the data for that area is downloaded?
Posts: 2
Participants: 2
@Centomini wrote:
Hi everyone, I should mount the battery and the external magnetometer (3DR GNSS/Compass) as per the attached image. The distance between the two elements would be 5 cm. Do you think it’s okay to avoid magnetometer interference?
F.
Posts: 1
Participants: 1
@kamo wrote:
Please advise me !!!
Now, I build X-copter with Pixhawk 4 flight controller as follow…
- Frame : S500PCB
- Tx (Flysky fs-i6x) / Rx (Fly sky fs-ia6b)
- Flight controller : Pixhawk 4
- GPS Module : Radiolink SE100
- Telemetry
- All calibrated
(My problem)
- I can’t arm using throttle down + rudder right but armed by pitch down + roll right
- After armed motor not spin and sometime the motor does not stop after lowering the throttle.
- The motor operation is accelerated and the light is not smooth with delay.
Posts: 2
Participants: 2
@Pocsaji wrote:
hy
Steering Rate PID TuningReal-Time viewing of Steering PIDs
I select “pidachieved”, and I did not find “piddesired”. can you help how find it or how can i replace it?
Posts: 2
Participants: 1
@sbofill wrote:
Merry Christmas everyone. I just purchased the new LIDAR Lite v4 (https://www.sparkfun.com/products/15776) Has anyone integrated this with Pixhawk PX4/Mission Planner yet?
I was able to get the LIDAR Lite v3 working with Arducopter Firmware 4.0 but it won’t work with LIDAR Lite v4 and there is zero documentation online in regard to parameters, etc for LIDAR Lite v4 within Mission Planner.
Any help or advice would be greatly appreciated.
-Steve
Posts: 1
Participants: 1
@Daniel_Goodrick wrote:
I am looking for recommendations for a tutorial to build a rover. The tutorial on this site was not what I am looking for and I don’t know if anything better exists but, ideally, the tutorial would start with a list of required and recommended equipment, an expected host vehicle configuration and the necessary accommodations for deviations from this configuration.
I have a stock traxxas rustler with an upgraded but brushed motor, 7 cell nimh battery (8.5v), stock esc, servos and two channel receiver, so if there is a tutorial with this host configuration, that might be ideal.
Alternatively, my specific questions from this tutorial are:
- Can I keep my normal controller/transmitter (since I am used to it)? I don’t know if there is a way to take control from the autopilot with my standard transmitter. I was hoping there is a way to disarm it if any input from the throttle (or steering) is received.
- Can I use the standard motor/esc - do I need a separate BEC for the autopilot? Can I drive the steering servo with just the autopilot?
- Do I practically need a zigbee (or similar) to talk to the autopilot or will a usb cable suffice?
Posts: 1
Participants: 1
@bpereiradasilva wrote:
Dear All,
I have an IRIS+ and would like to be able to use the “Gripper”.
Copter 3.6.x has dropped Gripper support for PixHawk1.Is it possible and safe to use 3.5.x with the Gripper Support?
Or can we compile the last Version with the Gripper enabled ?Thanks a lot.
B
Posts: 1
Participants: 1
@lakhe85 wrote:
Hi everyone,
I’m operating a Nimbus VTOL plane and she flies great running 3.9.8 firmware. But 2 weeks ago, when I plugged the battery, suddenly all parameters in the Pixhawk were reset to default parameters of an ArduPlane (not VTOL Plane). I thought this might be a bug of the firmware, so I updated to 4.0.1 and reload the parameters of the Nimbus. Everything seemed to be back to normal, I flied another 5,6 times without problems. However, today it happened two times in one afternoon. Every parameters were reset to default ArduPlane.
Could anyone have any idea about this problem? this is a firmware problem or a hardware problem? thank you so much.
Best regards,
Posts: 1
Participants: 1
@okok wrote:
Check BRD_TYPE:INS:unable to initialise driver Where is the problem?
Posts: 1
Participants: 1
@vyoufinder wrote:
I think I’ve got my octocopter ready to auto-tune… Got the s1000 motors designated in the right order, got my esc PWM_MOT_MAX and PWM_MOT_MIN set for the DJI ESC’s (1120 minimum and 1920 maximum), then calibrated my Taranis radio outputs iusing Mission Planner to go from 1000 to 2000. I think it’s all great and ready, but kind of want an experienced set of eyes to look at what I’ve done and tell me if something looks obviously wrong or like it could have been done a different (better) way. It’s confusing to me how these PWM values for throttle are being derived considering all the adjustments:
OpenTX Companion Taranis X9D+ radio Output settings:
Mission Planner MOT_PWM_MAX & MOT_PWM_MIN:
Gives me a throttle low:
and a throttle high:
but using servo outputs from Mission Planner:
I sort of feel like I should be setting my servo outputs to go from 1120 to 1920 (same as the DJI ESC’;s) … Is this the case?
Posts: 2
Participants: 2
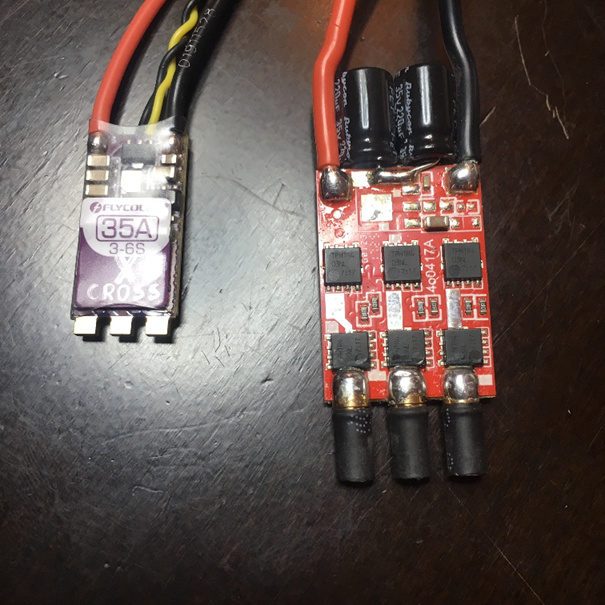
@alberto.munizaga wrote:
Hi, I have this two kind of ESC, almost same specs, the little one in fact support 35Amps and the other 30Amp
What is the difference between them beside the size? wich one is better? why the biggest has capacitators?
Biger is better in this case?
here are the links
https://www.rc-wing.com/arris-30a-opto-esc.html
https://www.rc-wing.com/flycolor-x-c...hless-esc.html](https://www.rc-wing.com/flycolor-x-cross-bl-32-35a-2-6s-dshot-brushless-esc.htmlThe motors are
15x55 props, 6S 20000mah battery
Posts: 1
Participants: 1
@joecochrane wrote:
Hi
Please can someone help me.
I have just got a Mini pix, which I want to use with my Spektrum DX9 TX, and a Spektrum satellite RX.
However the Plug on the Mini pix is 4 wire, and the lead on the Spektrum Sat RX is a 3 wire.
Easy on the Pixhawk, it’s a 3 wire connection.
Any suggestions please
Cheers
Joe
Posts: 1
Participants: 1