I am using APM planner 2.0.26 with windows 10, and cannot connect them together when I want to install firmware it displays the error " No valid device found, check to be sure your apm 2.5+ or pixhawk/px4 is plugged in, and drivers are installed"
I think the problem might be with connectivity with my usb cable, because when I connect it, I hear no sound from windows.
Hi, i am new to ardupilot etc. but i am working on a project and i need some help with it.
The goal is to have people who are new to flying drones perform some tasks indoor with quad. It would be the best if the drone could somehow have a position hold function. A friend of mine mentioned that a flow sensor would be a good option.
How do i know that the sensor and fc board i want to use are compatible?
For the fc i was looking to use the Airbot Omnibus F4 V6 and for the flowsensor the px4flow.
Hi, i have a pixhawk 2.4.8 and i’m setting it to work with ardurover 4.0.
I have the problem that my pixhawk don’t receive signals from radio though i have set it ppm mode on ch1. I done this test too : and radio in ppm and pwm/ppm encoder to pixhawk.
Before to say it is broken i would like to know if it has an other setting to able the ppm input. Can you help me? Thank you very much.
I have digital fuel sensor which is been places to the bottom of the tank, It will change the logic level 0 or 1 depends on the presence of water.
Can I use any of the AUX pin to read this input and display a mavlink msg or buzzer sound?
I using AUX pin 6, so
BTN_Enable=1;
BTN_PIN1=55;
BTN_REPORT_SEND=1;
The problem is I can’t able to observe any changes in Mission Planner(I checked at Messages and Status Tabs to observe changes), where do I see the parameter BTN_PIN1 changes ?
I want to know if I can set a Do set servo command after the last waypoint?
I want my boat to goto a waypoint then actavate a servo type relay and turn off the power supply.
Should the Do set servo command be before or after the last waypoint?
Thankyou
https://ardupilot.org/dev/docs/copter-commands-in-guided-mode.html
I read “SET_ATTITUDE_TARGET - this is the only message accepted by Guided_NoGPS” and the body pitch, roll and yaw rate inputs are disabled. which mean I cannot control that from Guided_NoGPS mode. The only way is to give it X, Y,Z position target and it will move to that position. Is this correct?
If it is correct it means I need an initial position lock and then a gps denied position estimation device like Optical flow(which I have). So does it mean I need a GPS to get initial position lock?
On a PixHawk(1), if I replace the MPU6000 with an ICM20689 accelerometer/gyro, will the firmware automatically recognize the new chip and initialize and use it, or will the code assume an MPU6000 since the board is an old one?
I’m curious if anyone has had success using the Omnibus Nano f4 V7 on a build with 4.0? I’m especially interested in RPM filtering. When hooking up ESC telemetry do you have to connect the 4in1 telemetry out to a single TLM pad, or chain it to all 4 pads? Any help or tips on using the nano V7 are much appreciated.
Back to a question from some time ago. I’m running an RPlidarA2 node in ROS. Can I use MavROS yet to send proximity data and set PRX_TYPE for MavLink in ArduRover? I recall you were working on it but can’t find that old discussion.
In the last year i was able to design and build a hybrid VTOL UAV. The Hybrid is named after Odin’s two ravens (Norse mythology). I used both names for the double functionality of the UAV, it is able to perform vertical flying like a helicopter and energy efficient flying like an airplane. Furthermore, HUGINogMUNIN serves some of the same purpose as the ravens did for Odin; The Ravens were sent out in the morning to gather information, which was passed on to Odin after their return in the evening. Which is why he was so knowledgeable!
HUGINogMUNIN is equipped with a sensors system for autonomous navigations, precise sensor stabilizing and registration of Tait-Bryan rotations (“Pitch, roll and yaw”). The Hybrid is further equipped with a spectrometer, measuring incoming radiation, along with other multi- and hyperspectral image creating sensors from Imec and Ximea for reflection measurements. HUGINogMUNIN makes for a very efficient tool in collecting the data needed in high-precision agriculture.
This was only possible with the great documentation and possibilitys of ArduPilot.
The community was always there to help out!
At mRobotics our commitment continues with the DIY community. From San Diego California we design and manufacture the necessary hardware to build platforms and solutions based on Ardupilot and PX4. And now we show you the next high-tech GPS that has build-in CAN, which includes many and special improvements to achieve maximum accuracy in positioning and guidance for safe navigation.
One of them is that we have incorporated the RM3100, a new Geomagnetic Sensor. Like a pair of glasses, the RM3100 Geomagnetic Sensor enables you to see magnetic fields clearly.
The RM3100 Geomagnetic Sensor is the highest performance sensor in its class with over 10 times better resolution and over 20 times lower noise than the leading Hall Effect sensor. It makes precise magnetic field measurements, which enables accurate calculation of heading and orientation. The earth’s magnetic field provides absolute reference for heading measurements and accurate motion tracking. Geomagnetic sensors are used to measure the earth’s magnetic field; however, in real world conditions, the earth’s magnetic field is often distorted by other surrounding fields. System components such as batteries, shielding materials, or motors will distort the geomagnetic field near the sensors. An additional design challenge is the changing magnetic environment that temporarily distorts the field like metal parts in furniture, a passing car, or nearby cell phones and computers. Geomagnetic sensors must first be able to see the different magnetic fields in order for the designer to separate earth’s magnetic fields and compensate for the distortions. PNI Sensor’s RM3100 eliminates any “blur” in your magnetic field measurements making distortion error correction a snap, and ultimately allowing you to easily and accurately calculate absolute orientation and heading of a drone or vehicle.
I share a little information that Jordi Muñoz comments about the new “mRo Location One GPS” that we are coming soon to launch.
For more information or questions please feel free to write me directly at help@mrobotics.io just mention me in the mail body or follow us on our social networks at www.mrobotics.io
Best regards!
Pedro Matabuena
mRo Director
Twitter: @pmatabuena
[Jordi Muñoz]
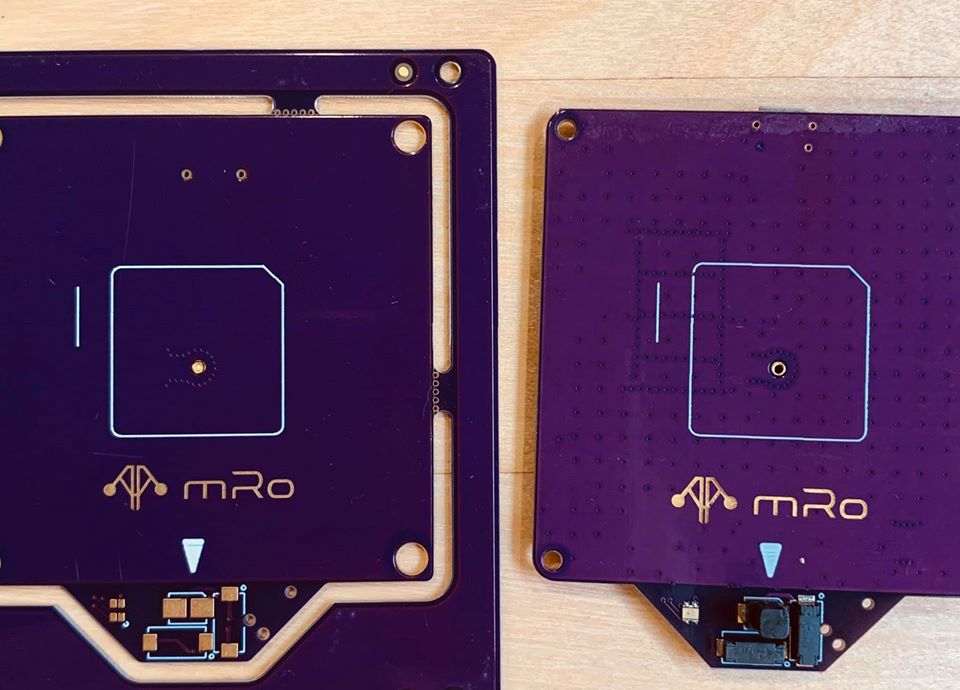
"Can you see the PCBs that are side by side? Can you spot the differences?
The one on the right is an early prototype, it has a lot of holes(vías) to “clamp” the ground plane. The one on the left is clean! Why? Well, we are experimenting (sorry for keeping all the engineering fun). The left one is a new concept that uses blind vías which are drilled by laser on the inner layers (4 in total). This allows us to have a very clean ground plane, which leaves the cooper of the first layer free of “artifacts”, and the ground is attached around the antenna pin -The ground plane shape and dimension is a fundamental component of the patch antenna-, the idea is to create a more predictable behavior.
This new GPS is known as mRo Location One and has build-in CAN. It also has the new RM3100 compass, the only one currently working and supported by Ardupilot (via CAN), this mag has extreme performance and we salivate every time we fly with it. We also added a “bump” to all of our GPSs, the bump is the little piece of land on the front where the magneto resides, an attempt to keep it away from all disturbances and boost performance.
This module is ready for mass production and it will be released with the new uBlox M9N, which has true multiconstallation support and higher refresh rate.
I have tried dynamic node and a static node # same results
Here is where it gets interesting…
If I power the FC with a usb cable tethered to the computer the UAVCAN compas shows up. At this point I plug in the flight batteries and unplug the USB cable and connect over a telemetry radio and life is good.
Please note
This is only for the compass. The GPS always works
This GPS by default uses dynamic node allocation, which relies on the flight controller to give it a node address. Prior to AP 4.0 this did not work, as those functions did not exist in AP…
The way around this is to use the UAVCAN software (which uses the hardware above) https://uavcan.org/GUI_Tool/Overview/ to set a specific node address, which you can pick anything between 1-125. You can also use a static node ID in AP 4.x as well with no issues. I picked to use 119 as my node ID
Enable the CAN driver (assuming you are on CAN1) CAN_P1_DRIVER set to 1
Then you need to set AP to look for the GPS on the UAVCAN bus… You do that by setting GPS_TYPE to 9 (which is UAVCAN)
Once you do that you reboot and plug in the GPS (if you haven’t already)
NOTE
There is no safety switch on CAN, you will either need to disable it as a pre arm check or purchase/fabricate one
After the flight controller has booted up you get a GPD 3D fix in a short amount of time. You may need to go outside… for me it got the fix in my basement.’
You will also now need to calibrate your Compass which is in the GPS.
You can validate that the compass function is seen by looking for a UAVCAN type of compass in the HWID section
In this case I have the compass as ID2 and you can see it says UAVCAN.
If you have CUBE hardware there is an issue with bootup time for the compass function…
It’s a little odd but these are the symptoms…
If you plug in the USB cable into the FC and it boots up you will see the compass. At this point you can plug in the flight batteries and all is good. However if you plug in the flight batteries and boot the flight controller this way you will not have a UAVCAN compass as show below:
There is an issue with how long the compass takes to boot up. It is longer than the AP timeout.
Here is the thread on the Zubax forum
To solve this problem you have to change the Board Timeout… For me 6000 works perfect every bootup. To set this configure BRD_BOOT_DELAY and set it to 6000.
If you follow these steps you should have zero issues using this GPS/Compass with AP
I updatet my local Mission Planner Software to latest 1.3.7.
Unfortunately the software doesn’t start anymore. (screenshot)
As mentioned in another post, I have already deleted the config.xml, but no effect.
Also the newest DirectX Driver is insatalled on my System.
I tried to unisnstall MP and install my old 1.3.5 again,
but it doesn’t start anymore, even though it works perfectly before that.
I am working on Windows 7 .
Are there any recommendations or steps to get MP running?
Hi, I want to build a plane where I have no access to the Pixracer usb port because I want to seal the plane against water. The plane has an RFD868 telemetric link and is connected via telem2 to a companion Raspberry Pi Zero W which can be accessed via wifi. I could also add the ESP8266 wifi module to the Pixracer.
Is it in principle possible to do a firmware update without access to USB? I found in the bootloader code that this is possible via UART but from what I understand this is hardcoded to UART2 which is telem1.
Is it required to do real cold start by power cycling to get into the bootloader mode or is there a way to do this by software only means, i.e. software reboot plus possibly setting some parameter?
What would be a good software to handle this update then? I guess QGC is expecting a firmware update via USB?




 or follow us on our social networks at
or follow us on our social networks at