@TheTroll wrote:
Hello ardupilot team!
It would be great to give users possibilities for installing ardupilot firmware to fresh boards like omnibus or matek wing WITHOUT USING INAV.
It would be really respectful approvoment.
Posts: 1
Participants: 1
@TheTroll wrote:
Hello ardupilot team!
It would be great to give users possibilities for installing ardupilot firmware to fresh boards like omnibus or matek wing WITHOUT USING INAV.
It would be really respectful approvoment.
Posts: 1
Participants: 1
@greenalastair wrote:
Hi all, I’m in the process of tuning my boat and I’m having issues understanding Acro mode for a skid steer setup. Please help me understand this:
In manual mode with a skid steer vehicle, pushing left stick up increases right motor speed and turns vehicle left? Opposite is true for right stick.
But in acro mode how does this work? Does one stick become steering and one become throttle? Can I make it that way? As my controller is an aircraft one with a sticky left throttle I’m having a lot of issues using it for this skid steer vehicle. It’s controllable in manual mode (but the right stick has to move left and right not up and down for some reason) and uncontrollable in acro mode.
Thanks
Al
Posts: 2
Participants: 2
@Cutacopter wrote:
Hi all.
My drone was able to have a MTOW of 5.5kg.Somehow I’ve changed a setting where now the motor power seems reduced and the MTOW is reduced to 4kg.
What setting could I have changed such that motors now deliver less total power.
Thx.
Gary
Posts: 2
Participants: 2
@Aaron_Gwilliam wrote:
I have a pixhawk 2.4.8 and not sure what platform im suppose to use(never had mp ask me befor)
Posts: 2
Participants: 1
@hwurzburg wrote:
Can someone tell the difference between this and the angle PID P in the vehicle? seems duplicative…
Posts: 1
Participants: 1
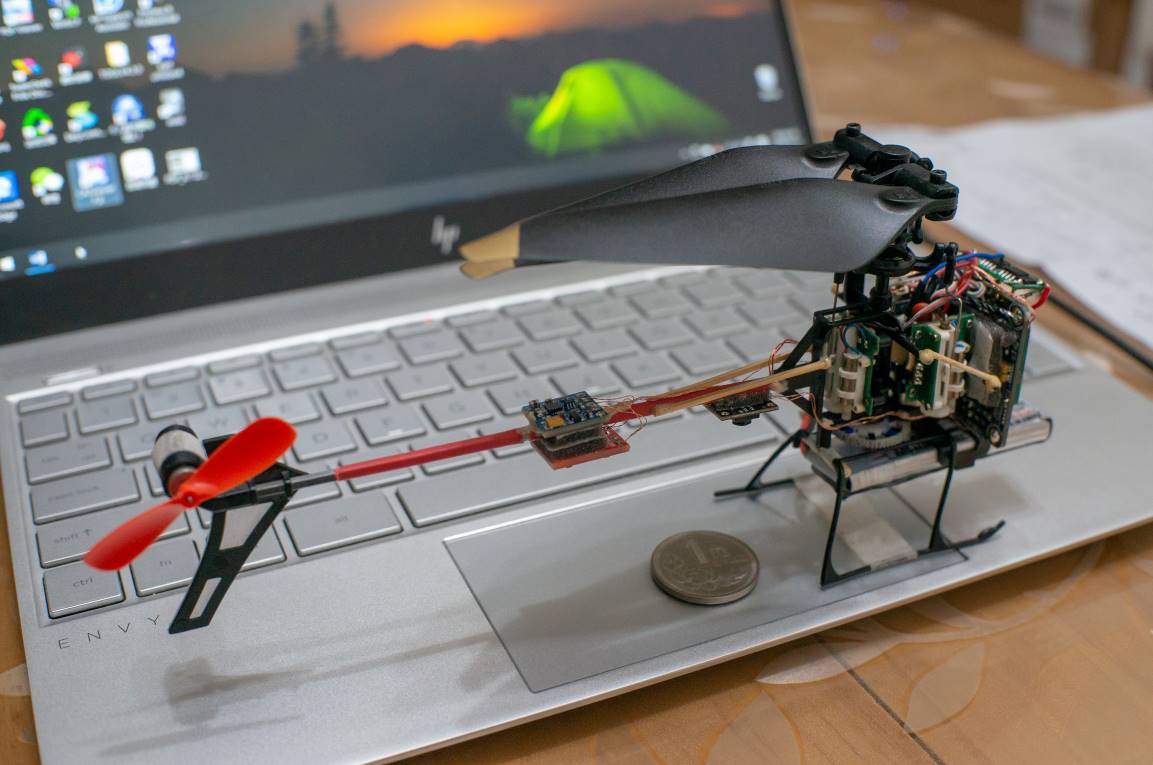
@huaji wrote:
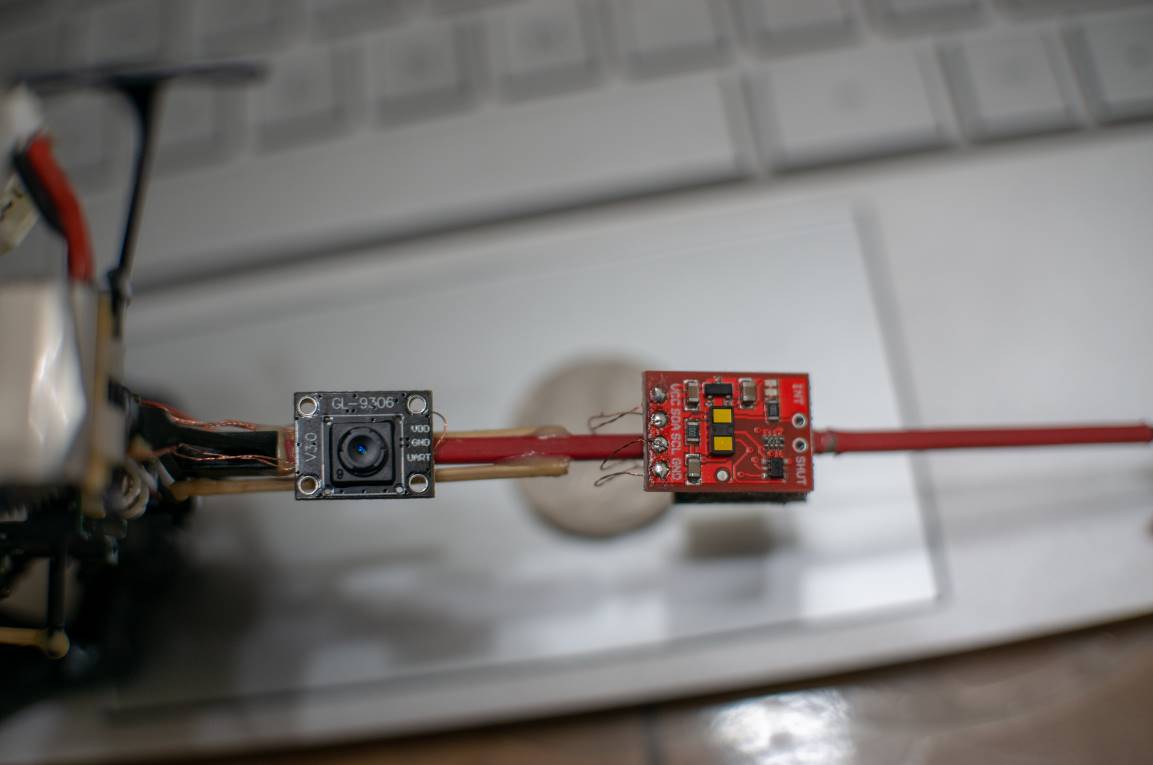
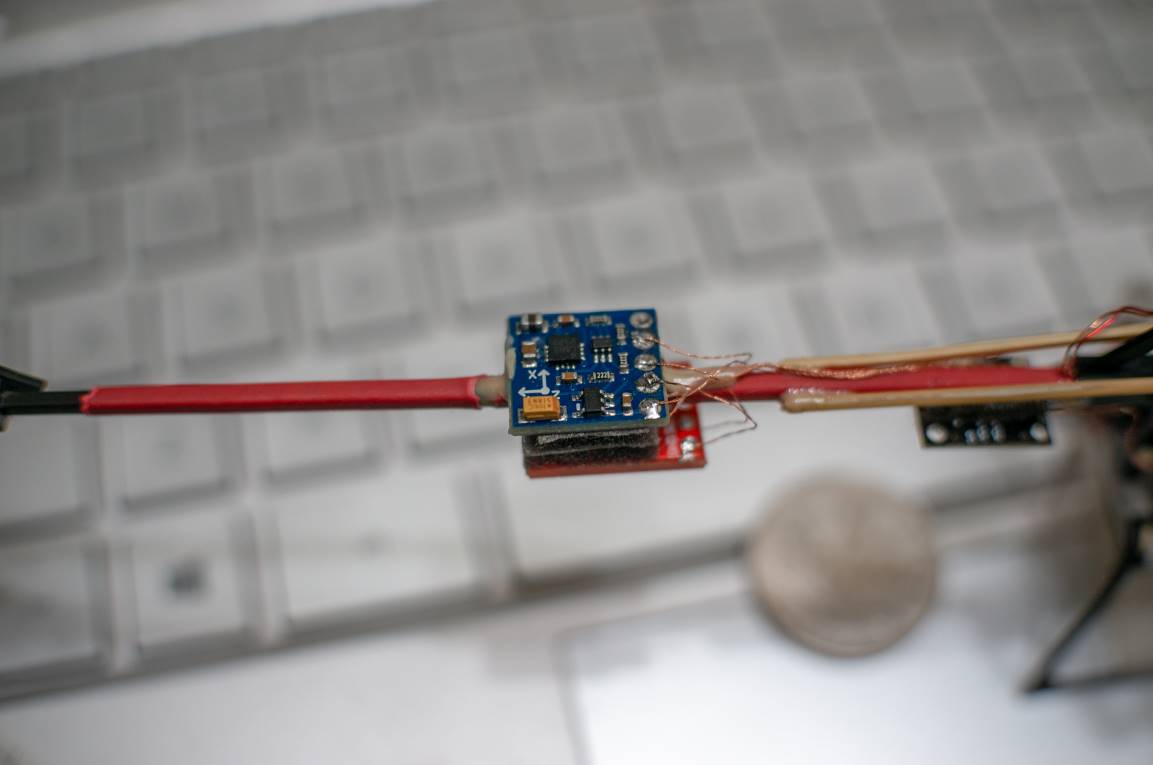
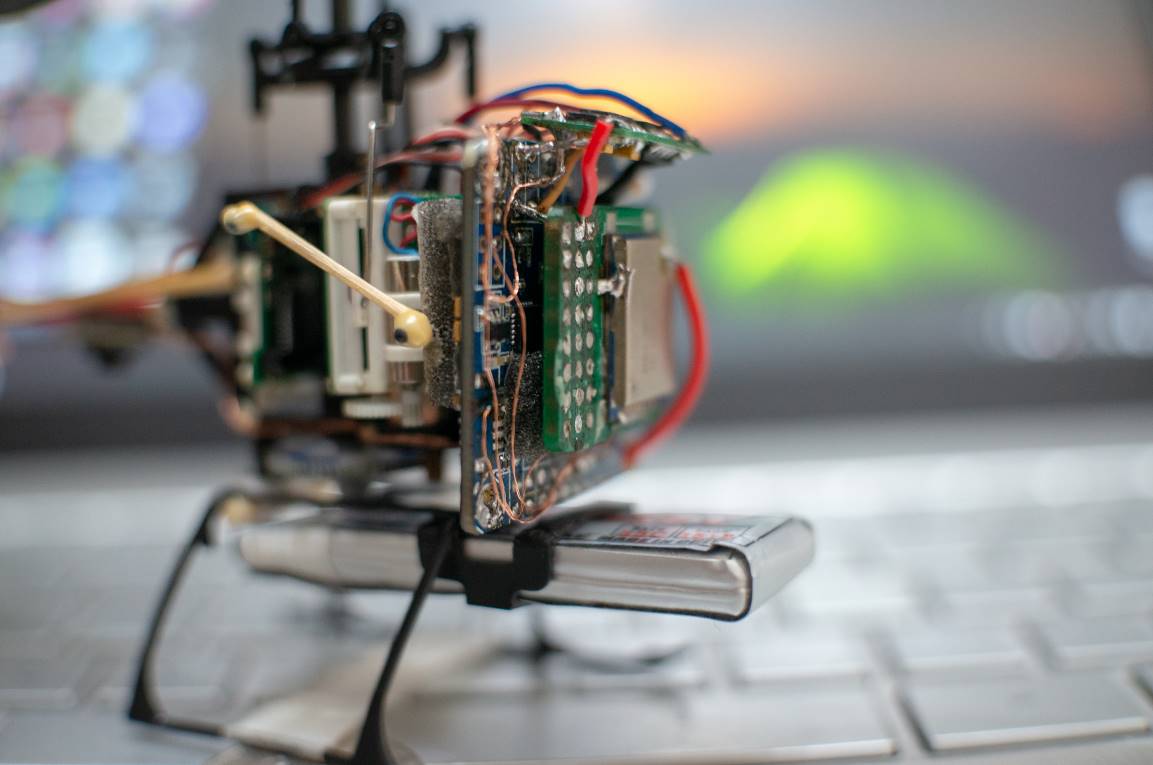
I made this aircraft based on the toy helicopter WLtoys V922.I use F4V3 as the main control board with some circuit modification to work with 1S battery.I changed main motor to 1020 coreless motor and propeller to DJI mavic propeller(d=22cm),lead to 11 mins flight time.
Below,there is the hardware and price list.
15$ Fuselage and server: original parts of WLtoys v922
3$ Battery: 3.8V 1s 450mah 85C
6$ Main control: omnibusf4v3
2$ Blade: DJI 8331f
0$ Tail motor: 716 coreless motor
3$ Electric adjustment: two-way brush esc
5$ Laser ranging module: vl53l1x
9$ Optical flow module: cx-of v3.0
2$ External Compass: hmc5883NEXT,I would like to share some pictures and videos with you
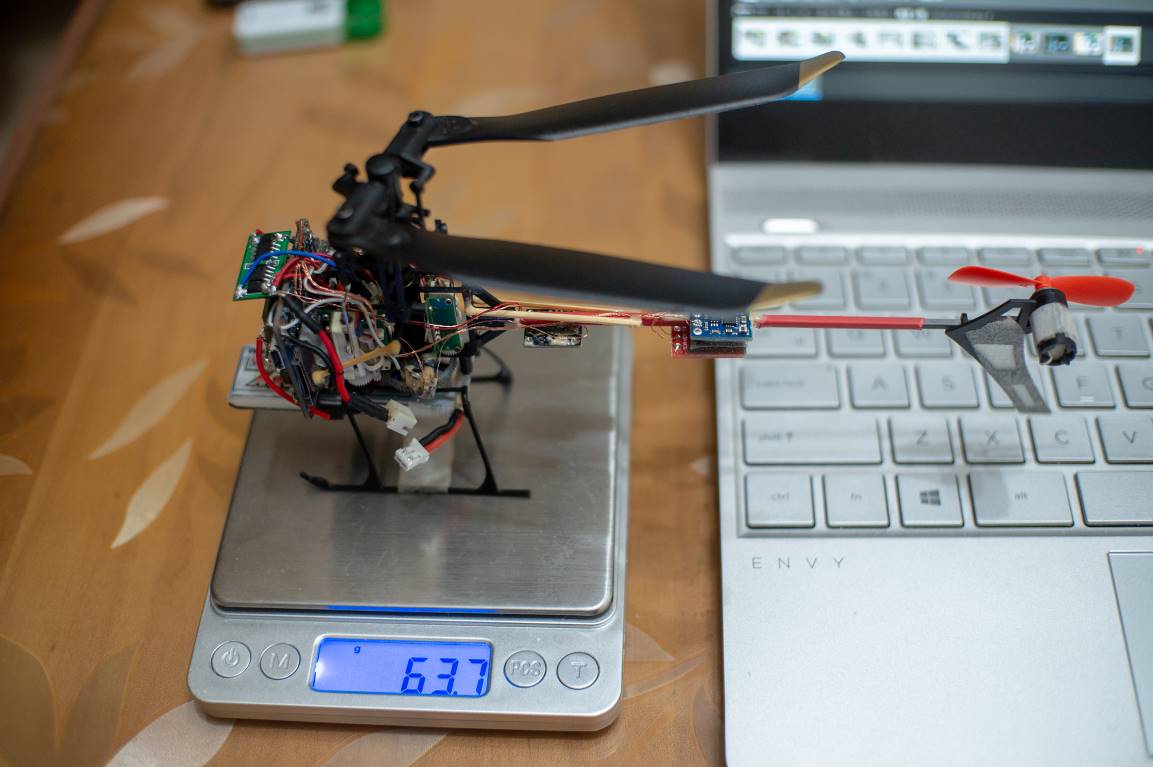
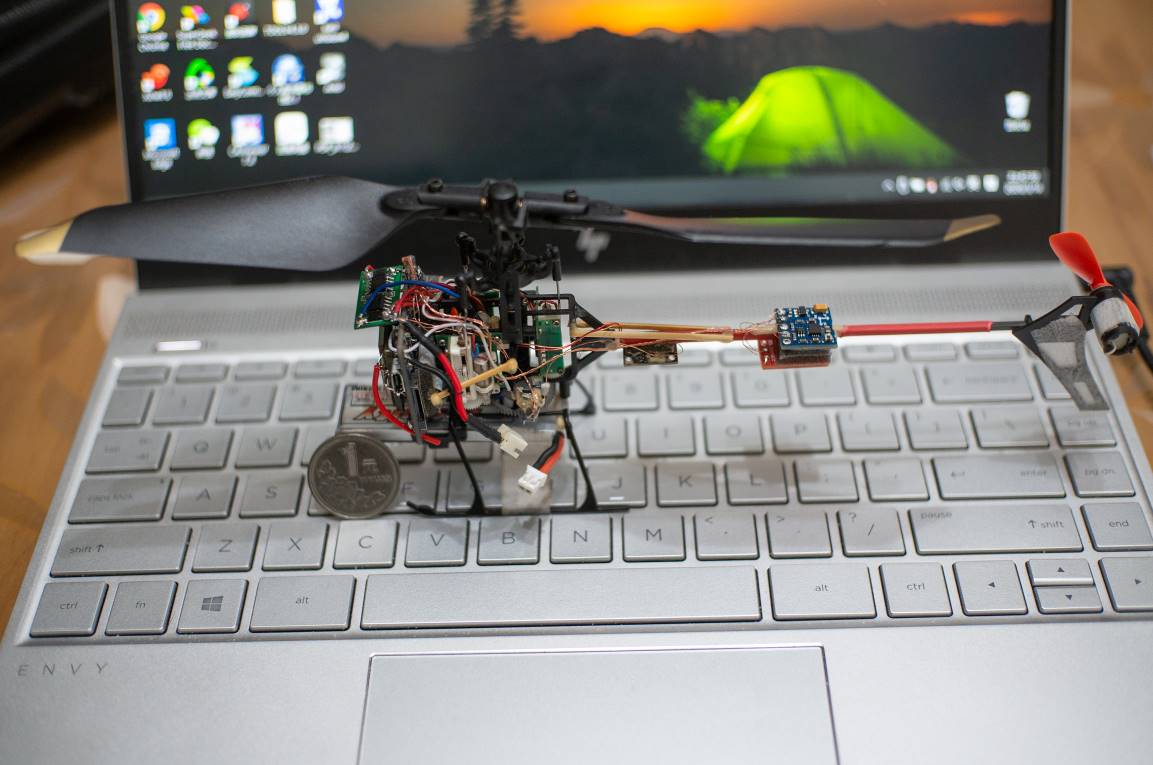
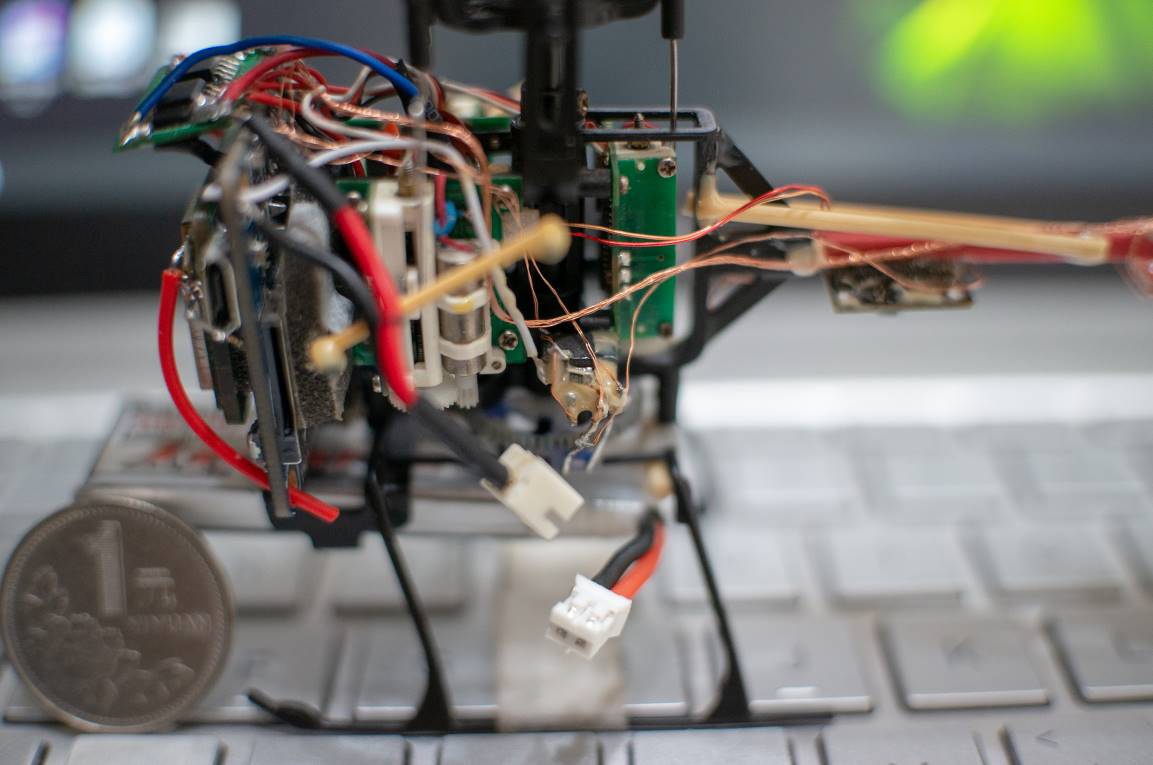
The helicopter tail have been changed to 45mm propeller for high efficiency.
The weight of the battery(AHTECH INFINITY 1S 450mAh 85C) is 12.4g.
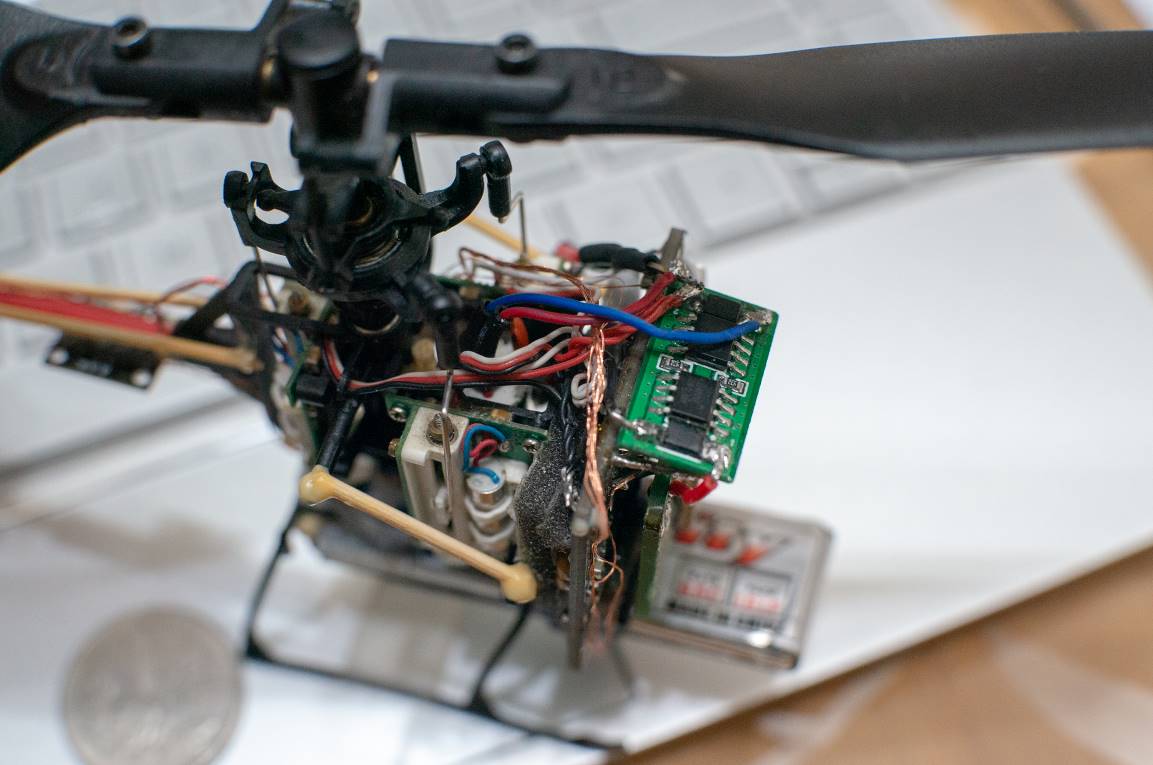
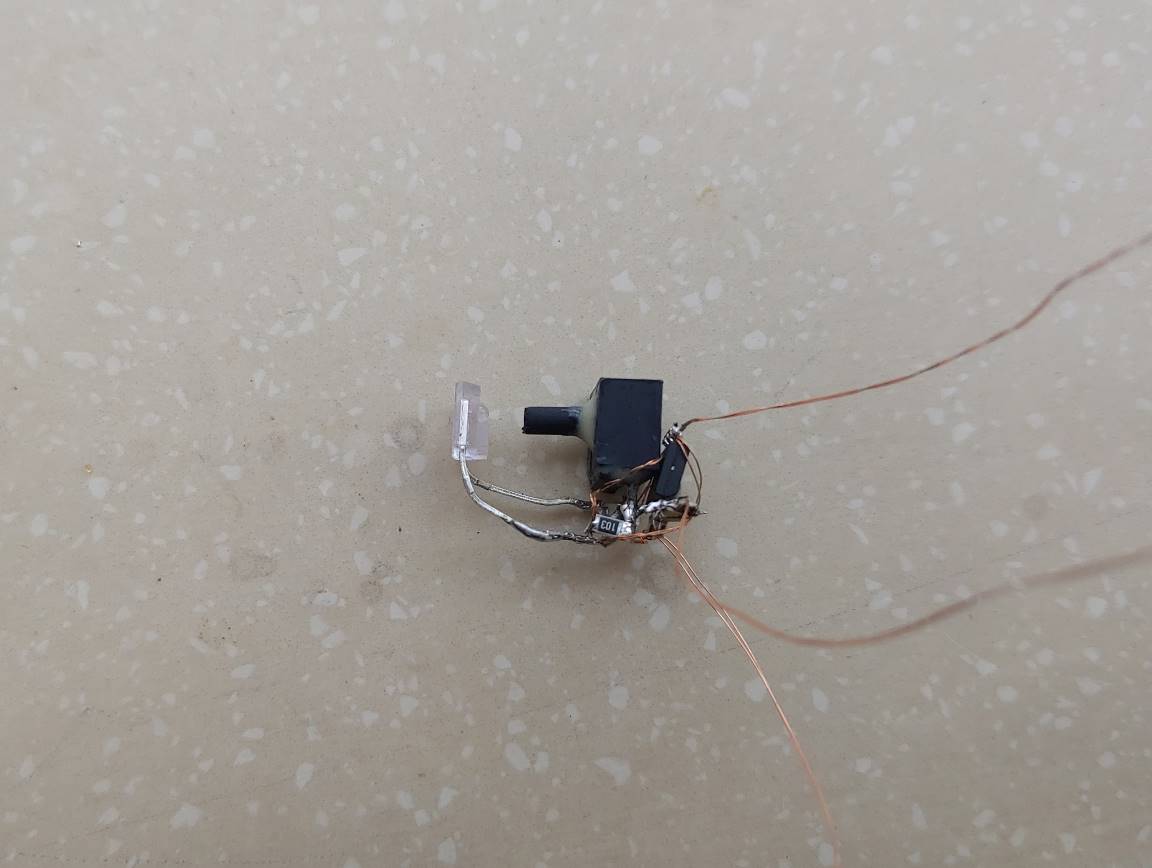
Next, I will introduce the RPM sensor.
I made a RPM sensor with the photoelectric pair and LM393 comparator.It weighs only 0.7g.
This picture shows it’s going to last about 11 minutes.
I would like to share the FLOWHOLD MODE video with you through this link.
https://www.bilibili.com/video/av97371855#reply2563009850
Posts: 1
Participants: 1
@flyespen wrote:
I can not find this listed under HW for Ardupilot Plane. I flashed with version 4.05 and it seems ok. Can somebody confirm that this can be used for Plane. https://docs.px4.io/v1.9.0/en/flight_controller/HKPilot32.html
Posts: 3
Participants: 3
@bobbyl8133 wrote:
NEED HELP! When I try to steam video in mission planner I get an error. See below - screen shot of error.
Posts: 1
Participants: 1
@CharlesB123 wrote:
I’m trying to set my Runcam hybrid up on my quad running a pixracer with 4.03
When I set rc channel 8 to Runcam if I operate the channel, I get Invalid channel option (78)
I know the function is new, but has anyone any ideas what I have setup wrong?Regards
Charles
Posts: 1
Participants: 1
@kghodstinat wrote:
am Using WSL for windows.
In ubuntu Terminal I type:
dronekit-sitl copter
In another terminal:
sudo mavproxy.py --master tcp:127.0.0.1:5760 --out 127.0.0.1:1450
Then I open the mission planner I am trying to connect using UDP and port 1450, but It wouldn’t connect. Can someone please Help?
Posts: 1
Participants: 1
@Dhananjay_Khairnar wrote:
Hi friends I need help regarding Ardupilot firmware(copter 3.6 FMUv5) flash to erase. I am working on a custom firmware for Ardupilot. where I added the MBEDTLS library and implemented a secure Key store in Ardupilot firmware. I have reserve flash sector 23 for storing rsa2048 keys in the linker script. At some point, I need to erase that sector. I have used the stm32 hal library to achieve direct flash read-write operation. READ and WRITE(only 1 time write as flash can be erased in sector and mass erase only) is working. but sector erase is not working. So my question is. Is there any reference in code that provides the functionality to erase flash sector or similar.
Posts: 1
Participants: 1
@lavravi0104 wrote:
Yesterday while doing the PID Tunning …quad fail down and damaged …how Tlog can help me to understand the reason of crash,??
Posts: 2
Participants: 2
@lavravi0104 wrote:
Please help me as i am unable to trigger the servo from channel 2 of aux output i.e servo10 in pixhawk cube. In full parameter tree all the parameters and value is correct. But still unable to find what may the problem.
Posts: 2
Participants: 2
@agrowsoft wrote:
Hello,
I would like to use an octa frame type “I”. I would like to arrange the frame with four motors in the front of the frame and four motors in the back like:
M1--------M2--------M3--------M4
^
|
|
|
M5--------M6--------M7--------M8My questions are:
I see the code in AP_MotorsMatrix.cpp
case MOTOR_FRAME_TYPE_I:
add_motor_raw(AP_MOTORS_MOT_1, 0.333f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 1);
add_motor_raw(AP_MOTORS_MOT_2, -0.333f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 5);
add_motor_raw(AP_MOTORS_MOT_3, 1.0f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 2);
add_motor_raw(AP_MOTORS_MOT_4, 0.333f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 4);
add_motor_raw(AP_MOTORS_MOT_5, -0.333f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 8);
add_motor_raw(AP_MOTORS_MOT_6, -1.0f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 6);
add_motor_raw(AP_MOTORS_MOT_7, -1.0f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 7);
add_motor_raw(AP_MOTORS_MOT_8, 1.0f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3);
break;
This frame type is supported, correct? And would I use number 15 for the parameter setting?What number (on a Cube/Pixhawk 2.1) would I connect each motor to on the “Main Output” so that they are connected correctly? Or another way of asking - is there a diagram like the Octa H (https://ardupilot.org/copter/_images/motororder-octo-h-2d.png) for the I frame type?
THANKS!
Posts: 1
Participants: 1
@Ali_Shreif wrote:
Hi everybody.
Several months building a large quad with pixhawk px4 fmuv2 installed, and long range video transmission, with a gimbal, and powered by a large 22volts 12000mah battery. The whole weight is 4kgs, and the quad flew for continuous 35 minutes. I was very happy about the long flight time and its good stability. Until last week, and just the second flight when I was trying video recording above a lake, and after 5 minutes flight, the quad began to wobble crazily, and I couldn’t control it before it was falling into the lake and sunk. After five hours, I was able to extract it from 3 meters under water ,using a water bike and following last GPS position in QgroundControl.
After reviewing the log, and connections, I concluded that the cause might be a disconnected wire from the power board which touched the board and caused it to burn, although the ESCs were directly connected to the battery and the pixhawk directly to the power module.
I disassembled all the parts,clean, brush,dry… and I was happy I could recover all of them except for the pixhawk.
After first connect to Pc via usb port, it was powered normally, all leds and main light were functionning OK. But I couldn’t power it from battery. Another thing was that I could install the px4 firmware on it but not the arducopter and the main led light never lit. And after a stupid try of installing px4io bootloader from sd card, the pixhawk was no longer seen from MP or Qgroundcontrol, I tried the python loader , it gave a message “waiting for the bootloader” although I tried to hold switch while powering the pixhawk.Note: the leds status when connected to pc in normal mode:
IO POWER AND FMU POWER:ON
IO B/E: ON
IO Act: blinkingWhen in boot mode
IO POWER AND FMU POWER:ON
IO B/E:blinking
IO Act: OFFPictures Before and after crash and log file are attached**
Uploading: 20200212_215731.jpg… Uploading: 20200317_154851.jpg… Uploading: 20200317_175513.jpg… Uploading: 20200317_175517.jpg… https://drive.google.com/open?id=1lMIJXHXnNArYOJhicrXHQeZLS-_y1VWJ
Any help to recover my pixhawk back and also resolving powering problem from battery will be really appreciated.
Thx in advance
Posts: 3
Participants: 3
@Rusty_Jones wrote:
Not sure what is wrong here, maybe the way I am doing this. Just uploaded AT 1.1.0 to an old generic “Pixhawk” Not sure where I got this one, but did have it sort of working on Tracker about a year ago. I wanted to update to current firmware, and now I can’t calibrate the accels or the compass. When I press the button to calibrate the accels it just changes the button to “Click when done” I remember it asking you to place on all six sides then press space , did that change?
Posts: 1
Participants: 1
@Yuriy_Homyakov wrote:
Hello!
I’ve got undesired plane behaviour during auto-takeoff - target takeoff altitude was 50m, plane reached 49.9888m (baro) and then flew 45sec on altitude 49-49.5m before it hit 50m level and takoff was completed.
Here is log https://plot.dron.ee/RGhr
I made 5 flights and only once saw such behaviourThanks
Posts: 1
Participants: 1
@LennyB01 wrote:
I know the documentation says that by default the autopilot should be mounted similar to a “plus” quad, but can it also be setup as an “x” quad?
Posts: 2
Participants: 2
@XinChengGe wrote:
I noticed that CUAV_Nora don’t have an IO MCU, And It’s still get 14 PWM output, I was wondering that I can designed a New FC, add the IO MCU back to the board, Then I can get totally 22 PWM out?
Posts: 1
Participants: 1
@chr89 wrote:
I wanted to update my Drotek 3 Pro flight controller with the new version of arducopter 4.0.
But once installed I no longer have access to RC7 to RC10 boxes are all empty ?
Thank you for your help
Posts: 7
Participants: 4