@arare wrote:
Hi. I’m trying to takeoff in new takeoff mode. After little shaking plane motors spinning well, but when I switch to Auto mode, to tell plane to start mission, motor stops.
Who can help?
Thanks
Posts: 1
Participants: 1
@arare wrote:
Hi. I’m trying to takeoff in new takeoff mode. After little shaking plane motors spinning well, but when I switch to Auto mode, to tell plane to start mission, motor stops.
Who can help?
Thanks
Posts: 1
Participants: 1
@iSkyMaster wrote:
Quick Question for anyone.
Does this OLED Display for PixHawk will display any lights, characters if you simply provide +5V and GND?
https://ardupilot.org/copter/docs/common-display-onboard.html
Posts: 1
Participants: 1
@LeeM wrote:
For some reason the buttons on the right side do not save. Every time I configure them, click save, then open, they are back to this.
Has anyone else got this problem?
Posts: 1
Participants: 1
@suasguy wrote:
I have a large multi-rotor designed with multiple redundancies in mind. I am currently using a single LightWare lidar, but would like to use more than one for altitude control, in case one fails.The current lidar is used for terrain following.
Arducopter 4 supports multiple rangefinders, but does not document the behaviour if more than one are configured as downward facing.
Is this possible or OK to try?
Posts: 1
Participants: 1
@AngelAlbeniz wrote:
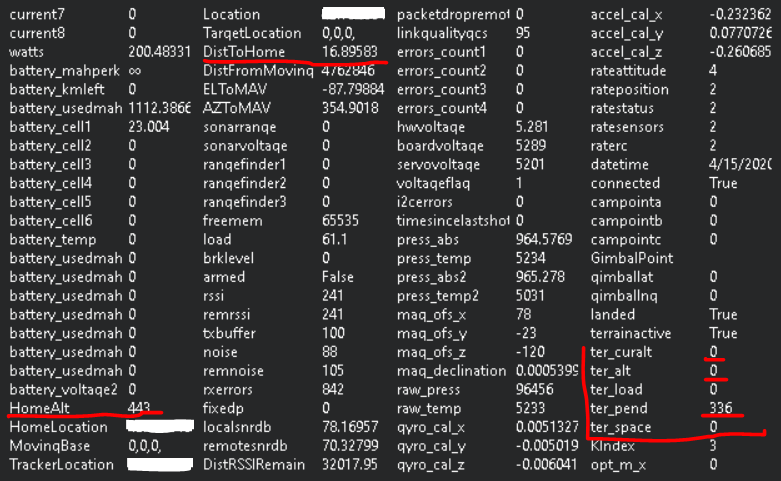
I am configuring a quadcopter with AC4.0.3, connected to MP via telemetry link. Everything is set up, but when I try to arm the copter the PreArm message “Waiting for Terrain data” pops up. The computer on which MP is installed has an internet connection, the copter has good GPS signal “GPS: 3D fix”. And on the flight planning tab the SRTM height is shown for the whole area in which I’m planning.
I also attach a screenshot of the status tab. In this image you can see that the ground height of the home point is known, the distance between the drone and the home point is only 17m but still the ground height is unknown (ter_alt and ter_curalt equals zero) and there are 336 tiles to download.
The only way I have managed to avoid this PreArm message and arm the copter is by deactivating the TERRAIN_FOLLOW parameter. But I would like to keep using this feature for the RTL mode.
Any idea how we can solve this problem?
Posts: 1
Participants: 1
@rmtorre wrote:
Hello guys
Does anyone know how to setup one relay on Pixhawk 4 and PM07 module? I really dont know which pin should I connect and what number I have to assign (Relay_pin) on mission planner.
Thanks in advance,
Rodrigo
Posts: 1
Participants: 1
@Ali_Shreif wrote:
Hi everybody, please may some experts in log inspection inform me about the performance of my quad. I suspect a little wobbling and I want to be sure because I dropped another quad before one month in a lake and I don’t look forward the same experience
here is the log link:
thx in advance
Posts: 1
Participants: 1
@Minion40 wrote:
Hello,
Currently I am doing flight control tests in X, Y and Z on a quad.
It works well but I would like the commands sent to be taken into account every second in the 3 axes simultaneously. Currently I send my orders every second and the drone takes into account the order every 3 to 4 seconds. It has a reaction time that is too slow compared to the information sent.
Do you have a solution to my problem?
Is there a parameter to modify in the pixhawk to make the drone more responsive or is it in the order of commands?
thank you in advance for your help
Good day and above all good health to you and your loved ones
Posts: 1
Participants: 1
@eminakgn wrote:
Hello everyone, I have a fixed-wing aircraft which contains cube black autopilot inside fuselage and Here 2 GPS mounted behind wings. The cube black has 2 MS5611 barometers and I figured out Here 2 involves MS5611 as well. I have enabled it through UAVCAN and set the parameter GND_PROBE_EXT to ‘4’ in autopilot. So that GND_ABS_PRESS3 appeared to have a value. Once I change GND_PRIMARY to ‘2’, FC will pick up the barometer attached to Here 2, so no longer configurations are required, right?
The point is, does it really worth to use this external barometer? In which case this usage will profit? Did any of you experienced such situation?
I’ve read air disturbances affect barometer, so having baro placed in a protected area (somehow) will save the day? But the cube placed inside aircraft is already isolated from air disturbances and its barometer is already isolated inside vibration dampened IMU board, right?
I guess this will be useful for quadcopters maybe. I have seen issues about prop effect that causes baro glitches during landing.In my aircraft, do rotating props at the empennage might introduce any air disturbance through the body? So my Here 2 baro will get faulty?
Posts: 1
Participants: 1
@billthomas302 wrote:
Problem: AUX1 on ORANGE CUBE won’t recognize an ESC. I can plug any ESC into any AUX input other than AUX 1 and the BLHeliSuite can read it fine. If I plug any ESC into AUX1, BLHeliSuite cannot read it. For example, I can plug the ESC that was working fine from AUX2 into AUX1 and BLHeliSuite cannot read that ESC.
In addition, the motor test will run fine in QGroundControl if I plug an ESC into AUX1.
Configuration:
FC - Pixhawk 2.1 Orange Cube
ESC - holybro tekko32 f3 metal esc(65A) - DSHOT150
Software: QGroundControl (ArduPilot), BLHeliSuite - both running on Mac.
Posts: 1
Participants: 1
@david_sastre wrote:
Hello,
I work developing custom GCS for several companies, and lately there has been a few of them asking me if working over HereLink is possible. I did a quick search and I’ve not been able to find an updated source code version of QGC for HereLink. Is there any possibility that somebody can point me to where it is, in case it is still open?
Thank you.
Posts: 1
Participants: 1
@IKER_138 wrote:
Hello, first of all sorry for my bad english, im Spanish. I want to build a autonomous boat using apm 2.6. I want to but this kit:
Mi question is if i necesary have to use a RC transmitter and receiver for making the autonomous boat. I dont need, because i want to use for 100% autonomous missions in mission planner. If something goes wrong, i have a kayak to catch. Can i make the boat without a rc emitter and receiver? With the telemetry.
Thanks for reading! I repeat that i am a very begginer in this, also in rc system… And also is my first post in this forum. I wish someone reply me
Posts: 7
Participants: 4
@Corrado_Steri wrote:
I tried to make a service that starts mavproxy in my rasperry. I made the service file and put it in systemd, i put the complete part in the exec of the service fie and user pi and all other settings. Once i start it with systemctl the service turns green and doesn’t throw any error but nothing comes out. If i use the same path i use in the service file in the command line it starts and does its things.
Is there anything special i have to add to make it work?
I am at home now and don’t have the file with me but i’ll post it tomorrow. Any help will be greatly appreciated.Another little question, if i wanted to update my installed mavproxy to the latest release how should i proceed? pip install --upgrade MAVProxy?
Corrado
Posts: 1
Participants: 1
@Ninstet wrote:
Hello,
So I have been attempting to set up WS2813 strip LEDs to function as direction / status indicators for my quad using the Pixhawk 2.4.8 and Lua scripting. However I have been having some issues.
Firstly, I always see the ‘Lua: No scripts to run’ message regardless as to whether a Lua script is running or not.
I have had success running a simple ‘hello world’ script example taken from here: https://github.com/ArduPilot/ardupilot/tree/ArduPlane-stable/libraries/AP_Scripting/examples (although for some reason I got a syntax error for the commented line). However when I attempt to run the LED roll script I am faced with multiple Lua errors (that always seem to cut off after a certain amount of characters in Mission Planner’s Messages tab rather annoyingly).
Setting SERVO12_FUNCTION to 94 and running this basic LED test script:
local num_leds = 4 local vez = 0 local chan chan = SRV_Channels:find_channel(94) if not chan then gcs:send_text(0, "LEDs: channel not set") return end chan = chan + 1 gcs:send_text(0, "LEDs started.") serialLED:set_num_LEDs(chan, num_leds) function update_LEDs() serialLED:set_RGB(chan, 1, 255, 255, 255) serialLED:send() return update_LEDs, 500 end return update_LEDs, 500Giving me this in Mission Planners Messages log:
I have attempted removing the variables and hard coding it but get the same error. It is very frustrating to debug as I can only see part of the error message!
As an aside, I was hoping to use the beta Mission Planner and MavFTP to upload my Lua scripts (instead of manually moving them across to the scripts folder in the SD card), however these are the only folders it gives me:
Thank you for any help!
Posts: 4
Participants: 2
@vyoufinder wrote:
On my octocopter, I am in the process of upgrading from Pixhawk1 to ProfiCNC Hex Board with Orange Cube. I’m currently transferring over .params I saved from the Pixhawk to the Cube, going through each to see if I should use from my saved .params file, or not and I’m not finding this parameter in the Complete Parameters List at: https://ardupilot.org/copter/docs/parameters.html
Anyone know what it is?
Posts: 5
Participants: 3
@Brian_Bourdeau wrote:
I have a few questions concerning autotune procedures.
I have watched several tuning videos, I have read all the tuning sections of the wiki and numerous internet searches.
Hardware: Holybro Pixhawk 4 system, ordered straight from holybro, control is via Jumper T-16 running Yaapu telemetry, Tarot 680Pro Hexacopter, 1355 props, Oneshot125 35amp escs running Blheli, Multistar elite 4006/740kv motors, dual 8000mah 4s Multistar, 12c turnigy batteries
Here goes
I can take off in stab, switch to Althold, then invoke Autotune. The craft twitches per the wiki and videos. When the radio notifies me that autotune is complete, I leave the craft in auto tune, land, and try to disarm, while still in auto tune. I attempt to disarm the craft using stick disarm, yaw left, throttle low, and it wont disarm. If I switch to stabilize, I can then disarm. I attempted to disarm via Mission Planner and received a warning.
Switching to stabilize disarms, but I lose the pids. What am I doing wrong?
Reading the wiki and watching the videos, nowhere does it say what mode to land in.
Posts: 13
Participants: 4
@vyoufinder wrote:
For parameter, “SIMPLE” in the full parameters list in Mission Planner, there is a description listed as:
“Bitmask which holds which flight modes use simple heading mode (eg bit 0 = 1 means Flight Mode 0 uses simple mode”
However, it is not listed in the Complete Parameter List at https://ardupilot.org/copter/docs/parameters.html
Can this be added to the Complete Parameters List?
Posts: 1
Participants: 1
@iSkyMaster wrote:
Like most of you, this OVID-19 really got me going on completing all fun projects.
Please showcase your Mad Scientist lab…
key features of my lab:
- TV to watch Netflix

- Oscilloscope, Bench power Supplies, Microscope, Soldering station and all other test equipment.
- All types of Pixhawk and some other FC’s based designs.
- LiDAR testing.
- Precision landing solution testing for Quads and VTOL’s
- Agricultural mapping, Spraying etc. design testing.
- Recently finally learned how to use Aux Pins on PixHawk

- Trying to marry DJI with Pixhawk…now that’s a fun one.
- Upto 80 KM telemetry and Live Video solution (I am designing it)
List goes on. What are you trying to solve?
Posts: 1
Participants: 1
@iSkyMaster wrote:
Selling price $105.00
This is one of the best flight simulators out there for its price.
Please check pics.
The product requires serial numbers (Printed on CD and radio) to register and activate the system under your name.
Posts: 1
Participants: 1
@iSkyMaster wrote:
Selling price $34.00 never used. Just sitting looking pretty
Features:
NX3evo provides four levels of flight modes: 1st, Beginner; 2nd.Practice; 3rd.Promotion; 4th.Expert.
Four wing types: Single (Dual ailerons)/Delta wing/V-tail.
Separate gain adjustment for each axis
Single/Separate Dual ailerons recognition capability.
Remote master gain adjustment during flight.
Including emergency mode, One-key auto safety.
Automatic stick centering
Automatic level offset, self-balance.
3D AVCS flight, Attitude locking.
Provide Y-wiring for aileron.
Specifications:
Voltage range: DC 4.5 每 6V
Response Frequency: 100Hz
Operating Temperature: 0-50~C
Dimension: 43x28x15mm
Weight: 11g
Package Includes:
NX3 evo Flight Controller Board x1
Posts: 1
Participants: 1