Hi I’m having trouble with the compass and I’m at a loss to figure it out.
- Compass drifting with error up to 15-90 deg
- Check mag field warnings
I’ve tried with 3 different external compass’ in different locations with same outcome.
All the compass’ calibrate ok. But if the compass orientation is set to automatic it changes to pitch 180. And the compass points behind the drone.
If I manually set the correct orientation which is roll 180 it points in the correct direction but has the above issues (I also turn of automatic detect and fix orientation)
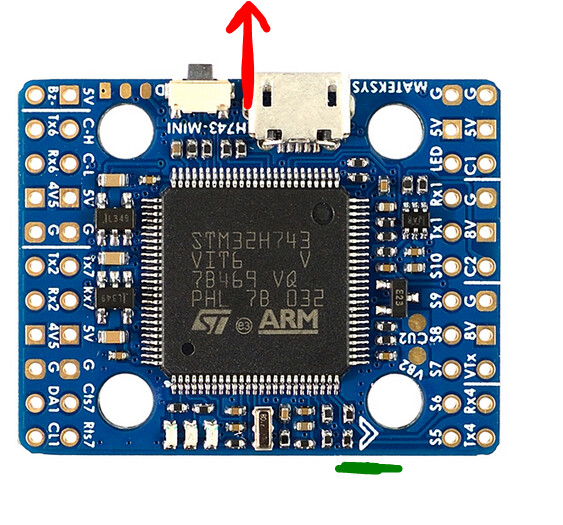
Flight controller orientation is 2: Yaw 90
Front of drone in direction of red arrow and FC pointed to the right hand side.
The compass orientation is pointing towards the front the aircraft but upside down (henced rolled 180).
I’ve done a dozen builds previously with the Matek Slim without these issues.
Compass is connected on I2C.
I’ve tried changing cables etc.
These are the calibration results when the compass is forced to 180 roll:
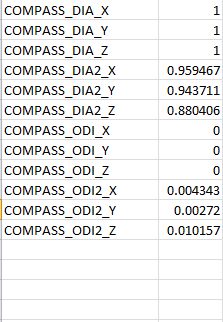
I only have the one compass so not sure why the results are stored under compass 2.
1 post - 1 participant

















