I am currently building a 7-inch FPV drone.
The drone is capable of stable flight, and I have applied notch filters as well.
Here’s my original setup and short flight video.
I believe the current PID values are reasonable, but I conducted autotune to increase the maximum acceleration values.
Considering the flight time, I only performed autotune for the Roll axis first.
I conducted tuning with AGGR set to 0.075.
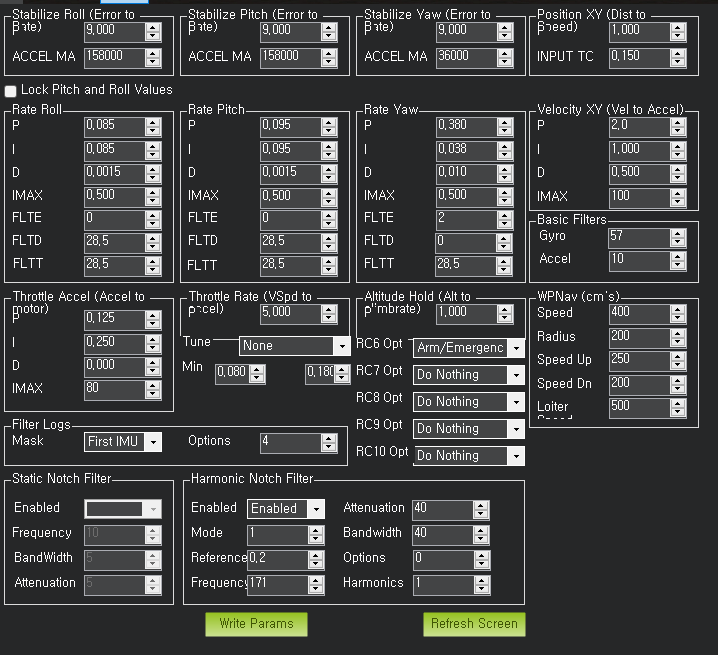
After confirming the “Success” message, I landed and checked the values.
However, as shown in the attached photo, the values turned out to be lower than I expected.

Issues Encountered During Autotune
-
Performed Autotune in Loiter Mode Instead of AltHold Mode
- However, since Autotune is based on AltHold, I believe this shouldn’t have caused any problems.
-
Landed the Drone Once During Autotune
- Override was triggered during this time, but I think it did not affect autotune. I didn’t disconnect the battery, and the Autotune AUX channel switch remained in the High position. I also confirmed the Autotune “Success” message.
-
Vibration Issue? Notch Filter Issue?
- Unfortunately, I accidentally deleted the most recent flight logs.
Instead, I am uploading a log from a previous flight.
The values are almost identical, and the vibrations are generally good, averaging 3–5 and
staying below 10.
- Unfortunately, I accidentally deleted the most recent flight logs.
Should I try Autotune again, or should I manually adjust the values?
My drone uses pusher-style propellers (not puller), with the battery mounted underneath the frame and the payload on top.
The center of gravity is well-balanced.
1 post - 1 participant