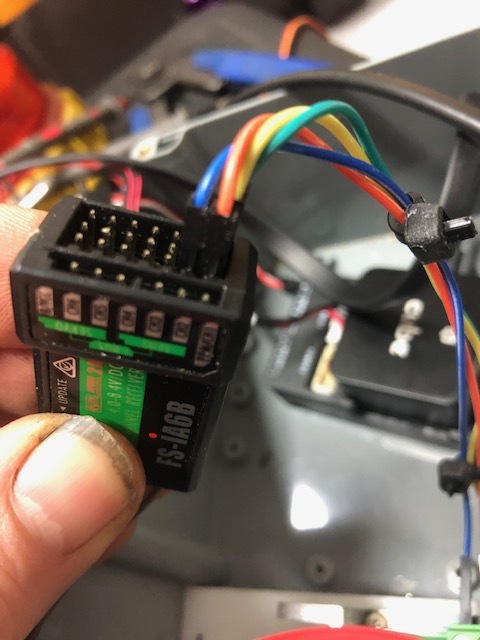
Flysky FS-IA6B to pixhawk 2.1 blackF Cube to Sabertooth 2x32
Hello all, wow am I having a huge learning curve.
I am very new and can wait to get up and running with my project.
Aim
First base is to enable my remote control to operate my rover platform via the pixhawk 2.1 black cube
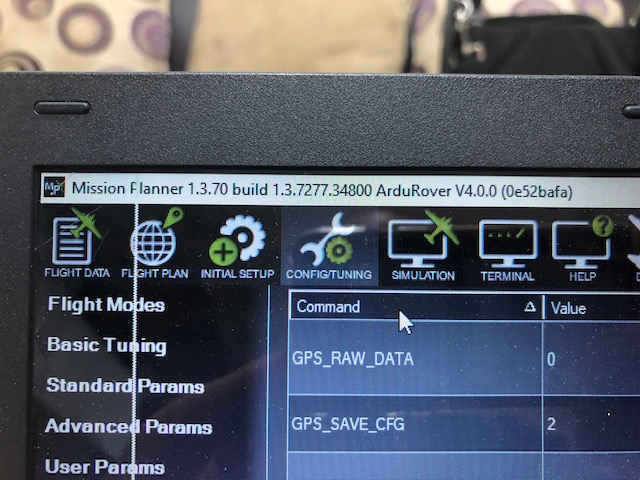
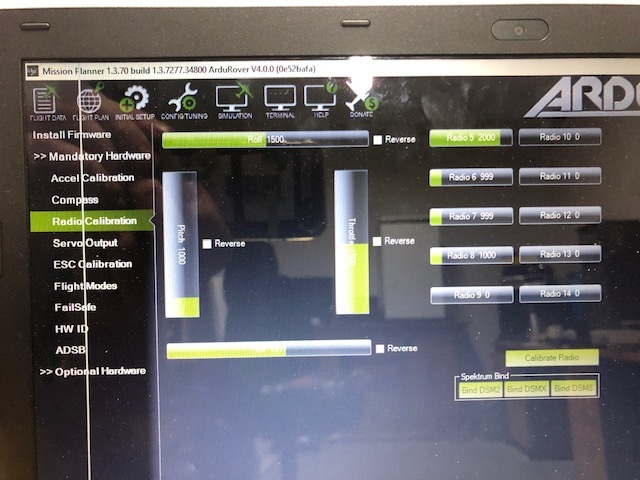
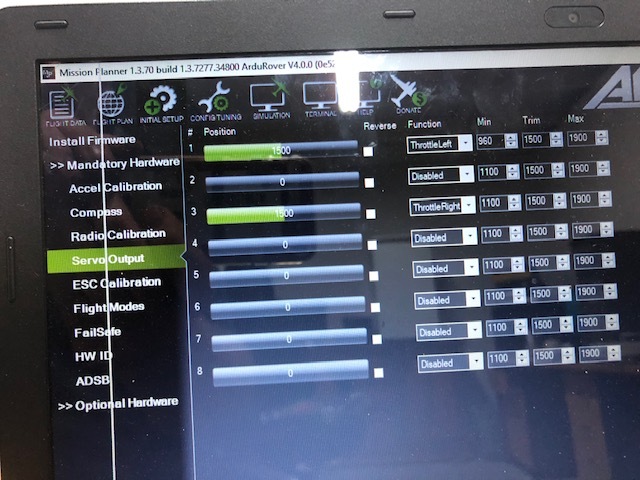
Mission Planner 1.3.70 Build 1.3.7277 ArduRover V4.0.0(0e52bafa)
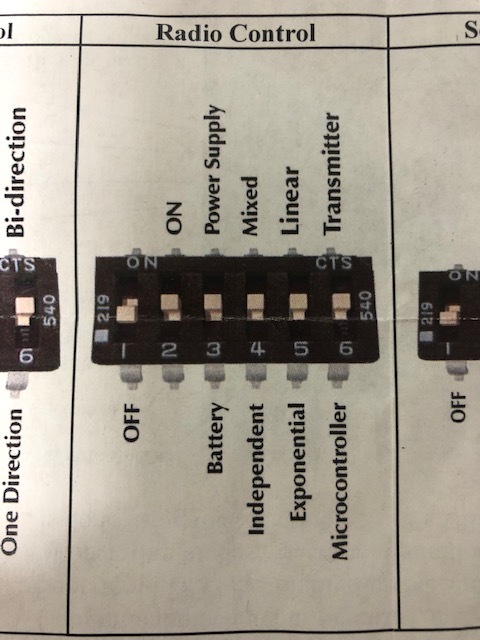
Sabertooth Dip settings are set to Radio control 1=off 2=on 3=on 4=on 5=on 6=on
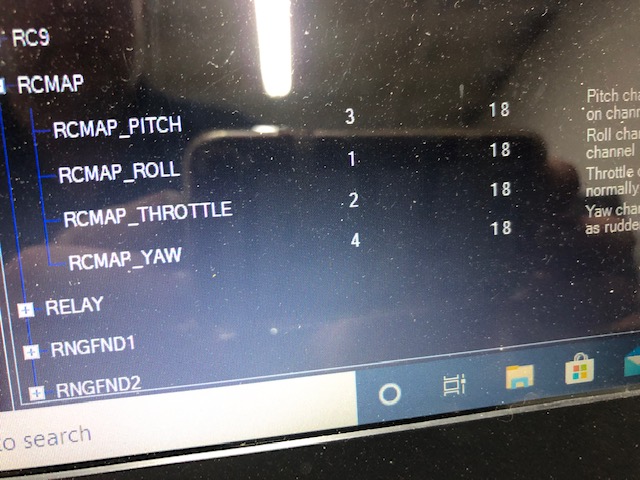
I can see the one paddle operating within the mission planner software but can understand why the output to the sabertooth is not working
I disconnect the PH 2.1 cube and made sure the radio to sabertooth was working and all good
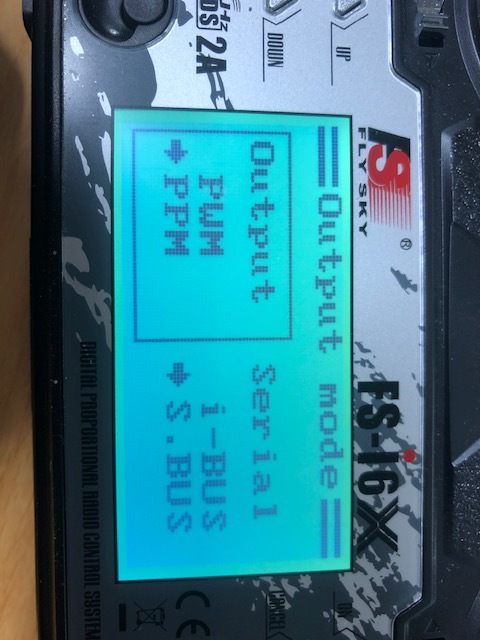
I have learn that in order for the mission planner software to see the radio it must be on SBUS PPM
with all this learning its difficult to know what I have done wrong
Please see the following images to support my issue
i am currently following the tuning process instructions and stumpled over an out of range issue for the ATC_RAT_YAW_FLTT parameter. It seems to me, that the min/max range (1Hz/5Hz instead 1Hz/50Hz) is not correct on the software side or do i miss something else?
How do I monitor the state of the EKF? Specifically I want to check if it is done initializing such that we are ready to fly.
When booting the autopilot, the EKF needs some time to be ready to flight. If I try to arm it in this timespan, I get a human readable warning APM: PreArm: EKF2 still initialising. The question is then: How can I know know if the EKF is ready to arm through MAVROS? (or through Mavlink without MAVROS?)
I have tried two topics: /mavros/estimator_status seems to be empty. No received messages.
/mavros/state has a field called system_status, but that seems to be set to 3 = STANDBY even when I get the error message APM: PreArm: EKF2 still initialising.
I don’t know if it is relevant, but I am trying to do GPS denied navigation, so the EKF initialization I am waiting for is the reinitialization after setting the origin with SET_GPS_GLOBAL_ORIGIN (mavrostopic: /mavros/global_position/set_gp_origin).
I am sure this has been discussed before but I can’t find such a discussion.
The forthcoming EASA regulations coming into force in July 2020 are beginning to put in place the ability to legally “A2- fly close to people” with UAS <4kg. (but no self built unless you are in the specific category)
All new drones will begin to be marked with categories C0,C1,C2… etc which will enable the user to understand what they can and can’t do with them.
Self built UAS are still allowed up to 25kg but only in A3 operations (far from people).
It would be good to start building in functionality to enable A2 operations for the specific category with self built aircraft.
With that in mind It would be really useful to have a dedicated low speed mode. This would-be able to switch in and out of a “low speed” mode with clear indications in mission planner that the mode is active.
Many ways of doing this but would a new flight mode make sense? “Loiter-Slow”. It would use all the same parameters as loiter except you would be able to adjust horizontal and vertical speed limit parameters. Possibly change RC feel to make the aircraft a bit more docile?
We have been manually doing this by changing parameters for loiter. However, some mission profiles require a high speed transit and then a low speed loiter in proximity to an object.
What are other peoples thoughts on this? Might already be a solution I am overlooking.
Hey!
I hope this is the right place to ask this!
I’ve had some problems with my Pixhawk mro the last few days. I can’t figure out how to connect my rc reciever. I have one antenna connected to the TELM1 port, but thats for the ground station, right? The rc reciever (I use a Spektrum AR610 one) should be connected to the pixhawk, I believe. From what I could find this is the only way to get the Pixhawk into Autopilot (through an AutoMode-switch. Is this true and which port would i need to use?
PS: I’m fairly new, so sorry if something was terribly wrong in the post above.
Cheers
Hmm I’m last 6 days continuous getting flights but 4th day I crashed to wall some gps glitch and my last propeller is broken ,
Story time :- i don’t have a any more propeller so I was continuously getting flights but recently I knew less flight time so I checked motor and saw motor is too hot (is it propeller fault) but motor hot typing is awkward.
Like this green are shows motor is hot and res is propeller is broken
And yesterday 5 april i borrow i 1 propeller of right side to my friend but I saw same problem but increase flight time , what is it ? anybody say
something?
I’m developing on Win10 with Cygwin and Eclipse.
I’m currently working on a fork of ArduPlane 4.1.0dev (cloned/forked 26.03.2020 I guess).
I only changed in libraries/AP_Mission and my changes are working in SITL as expexted.
To finish I started autotest.py with different vehicles - but with unexpected results.
For ArduPlane I’v got a failure that I can’t understand:
AUTOTEST: Stopping SITL
AUTOTEST: Failing tests: Button (Test Buttons) (Param fetch returned incorrect value (8.0) vs (0)) (see /cygdrive/c/users/willy/documents/github/buildlogs/ArduPlane-Button.txt)
FAILED STEP: fly.ArduPlane at Mon Apr 6 13:46:30 2020
Failure Summary:
fly.ArduPlane: Button (Test Buttons) (Param fetch returned incorrect value (8.0) vs (0)) (see /cygdrive/c/users/willy/documents/github/buildlogs/ArduPlane-Button.txt)
FAILED 1 tests: [‘fly.ArduPlane’]
And in the corresponding logfile I can read:
MANUAL> Requested parameter SIM_PIN_MASK
SIM_PIN_MASK = 8.0000000
param set SIM_PIN_MASK 0.0
param fetch SIM_PIN_MASK
param set SIM_PIN_MASK 0.0
MANUAL> param fetch SIM_PIN_MASK
MANUAL> Requested parameter SIM_PIN_MASK
SIM_PIN_MASK = 0.0000000
AUTOTEST: Drained 6239 messages from mav (5044.930753/s) AUTOTEST: FAILED: “Button (Test Buttons)”: ValueError(‘Param fetch returned incorrect value (8.0) vs (0)’,) (see /cygdrive/c/users/willy/documents/github/buildlogs/ArduPlane-Button.txt)
wp clear
wp list
wp clear
MANUAL> wp list
MANUAL> Got MAVLink msg: MISSION_ACK {target_system : 255, target_component : 0, type : 0, mission_type : 0}
Requesting 0 waypoints t=Mon Apr 6 13:42:08 2020 now=Mon Apr 6 13:42:08 2020
but for Quadplane there is no Problem:
AUTOTEST: Stopping SITL
AUTOTEST: Skipped tests:
CPUFailsafe (see servo channel values not scaled like ArduPlane)
PASSED STEP: fly.QuadPlane at Mon Apr 6 14:24:39 2020
check step: fly.QuadPlane
So I’m a little astonished and have no idea how to fix that.
Where can I see and understand what that Button-autotest is testing?
Is there a documentation about that tests in autotest where I could read?
So could anybody give me a hint how to proceed?
Or should I post that question in the Developers-Category?
(That’s my first contribution - so I feel a little insecure)
Hi there, I am using Plane 4.0 and have a RPi attached to autopilot on telem-2 port. I am assuming that GCS failsafe is taking action on telem-1 port, but If I need a additional failsafe option on telem2 due to companion computer guiding the plane might fail somehow and since the commands will timeout when CC is absent, I want to protect the Plane from undesired behaviour of loitering at that moment and just put it in RTL or AUTO mode so that it can run a pre-loaded LAND mission, Is there way to do so? Or I just have to give up on real radio failsafe and connect Rpi to telem-1 port? Because I could not find such option for telem2 so far.
Thanks in advance
I am starting the SITL in guided using ROS then I switch it to auto. it starts following the mission waypoints but after some time it’s constantly dropping to RTL. I am not commanding it to switch to RTL. it does it on its own.
what could be causing this?
its flying fine and following the mission wp as it should.
how could I get a log or error output that tells me what is triggering the auto to switch to RTL
Is there way to setup failsafe for companion computer in case of CC errors and totally disconnecting from FC? So that FC will perform a failsafe action. If not, any additional advice is welcome.
Hi developers, I have a question before I put in an enhancement request. In my mind the single biggest feature that makes inav attractive over ardupilot is the interactive OSD menu system. It is so convenient to be able to take off, fly a moment, land, change a setting, and take off again without having to bring out a laptop/tablet. Once a menu system is setup it would be trivial to add features to it, and with hardware with OSDs built in getting more and more popular I think it is a good path to pursue.
I think the logical way to implement this would be stick gestures, but I have read a couple times there are safety concerns with stick gestures on ardupilot since it uses throttle/yaw to arm.
I would like to work on/solicit help building an OSD menu system for ardupilot. I want to set some baseline rules and outline functionality before I post an enhancement or ask for people to help me spend time on it. If I were to start with stick gestures, is that doomed to never be implemented into master? I’ve thought about just using a dedicated RC channel to enable this menu but 90% of the time it would be a wasted channel(you couldn’t use it if the vehicle was armed).
My thought would be in the arming check file, add a parameter like “menu in use” so arming checks would fail if a menu is active, and even better arming requests aren’t even accepted while in a menu. To enter the menu there just needs to be a mutually exclusive window for throttle and entering a menu. i.e. throttle 0-15% for arm, throttle 40-60% for entering menu. If you require the throttle to always be above the arming window while menus are active, I don’t see any reason why this couldn’t be implemented in a safe manner. Of course osd menus could be disabled permanently by anyone who didn’t want them active.
Things I would definitely want in a menu system:
-PID values
-flight modes
-feature settings (smart audio vtx control in particular)
I’m using GLOBAL_POSITION_INT to determine the vehicle’s position. I understand this data is fused from several sources (multiple GPS units, if present, accelerometer, barometer, possibly others). Unfortunately, that message doesn’t include accuracy information.
Messages like GPS_RAW_INT and GPS2_RAW do include accuracy info, but it seems wrong to rely on that because the accuracy of the fused result could be higher than the accuracy of any specific GPS.
So, how do I get the accuracy of the fused position? Maybe ESTIMATOR_STATUS?
Hello all, my name is Rudy. I have used Pixhawk and Mission Planner for some time now, but I have just tried Mission Planner with a new Blade 330 heli. The project keeps suffering from GPS glitches even sitting on the bench, but especially if I just pick up the helicopter. But if I change firmware to plane the same Pixhawk mini does not have any issues. Just with the Heli firmware. I have tried standard as well, as beta versions, and I am running the latest version of Mission Planner 1.3.70. Any thoughts?
Also It appears as if I can go back and forth between Mission planner and QGroundcontrol with heli. Is that okay? Thanks for any help.
Vehicle was sitting stationary for 30ish seconds and then the autopilot deployed the parachute. Vehicle was stable until then. Parachute was not triggered manually. Has anyone seen anything like this before? Any ideas as to what caused it?
we have a rover with mecanum omnidirectional wheels. It seems that ardupilot does not support side movements in auto mode for such a rover. I am a software developer and I would like to implement something for this.
I do not have too much experiences with ardupilot code. Previously I was able to do some small modifications in GPS part.
Do you have any suggestion where to start or at least some hint to understand the ardupilot code which is responsible for transforming movement goals to instructions for motor controller?
I want to setting up ardupilot for the navio2 board on rpi3 running android9 OS so i had follow the tuto on how to build ardupilot from source but i got a difficulties when lunching the binary executable ,
I want to ask how to set linker flags .
When I send the below command to ArduPilot on SITL, it also changes throttle value (i.e., 1000) and then decreases altitude of the drone. Even though I can restore a original throttle value by using ‘master.mav.rc_channels_override_send’ command, I am curious about why adding way points changes the throttle value.
this if term is inside the input_euler_angle_roll_pitch_euler_rate_yaw() function that is inside the run() function that is inside the dast_loop() function.